 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Forward Processes for Score-Based Data Assimilation in High Dimensions
Apr 03, 2026Data assimilation is the process of estimating the time-evolving state of a dynamical system by integrating model predictions and noisy observations. It is commonly formulated as Bayesian filtering, but classical filters often struggle with accuracy or computational feasibility in high dimensions. Recently, score-based generative models have emerged as a scalable approach for high-dimensional data assimilation, enabling accurate modeling and sampling of complex distributions. However, existing score-based filters often specify the forward process independently of the data assimilation. As a result, the measurement-update step depends on heuristic approximations of the likelihood score, which can accumulate errors and degrade performance over time. Here, we propose a measurement-aware score-based filter (MASF) that defines a measurement-aware forward process directly from the measurement equation. This construction makes the likelihood score analytically tractable: for linear measurements, we derive the exact likelihood score and combine it with a learned prior score to obtain the posterior score. Numerical experiments covering a range of settings, including high-dimensional datasets, demonstrate improved accuracy and stability over existing score-based filters.
Robot Metabolism: Towards machines that can grow by consuming other machines
Nov 17, 2024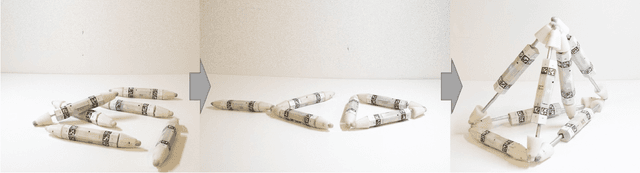
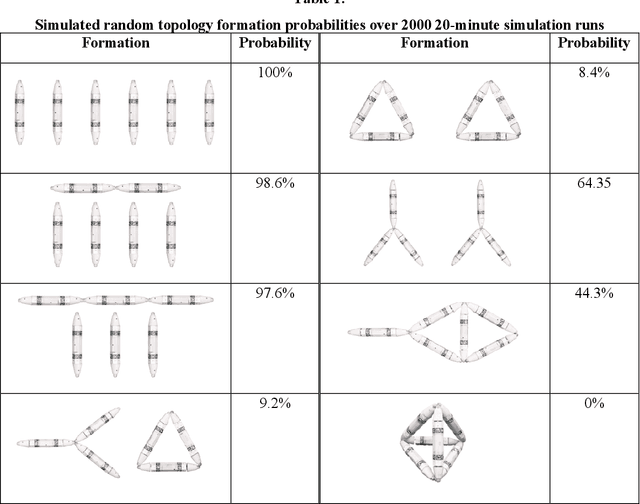
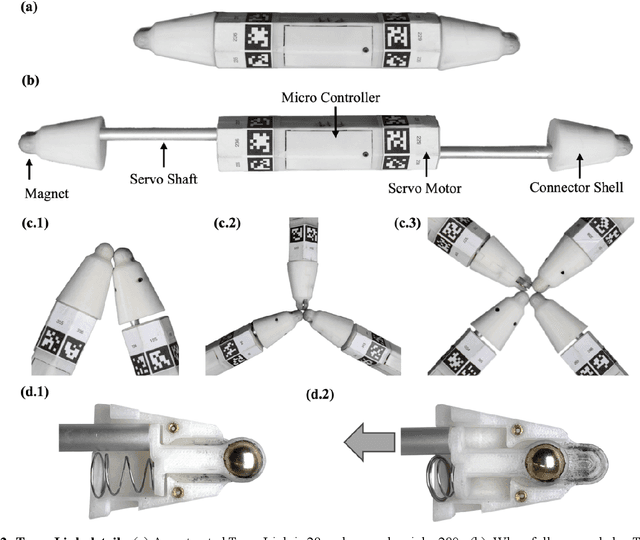
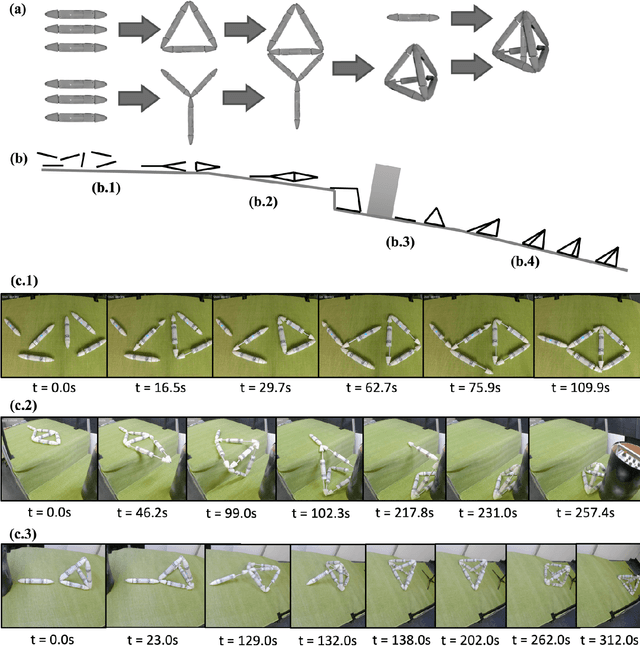
Biological lifeforms can heal, grow, adapt, and reproduce -- abilities essential for sustained survival and development. In contrast, robots today are primarily monolithic machines with limited ability to self-repair, physically develop, or incorporate material from their environments. A key challenge to such physical adaptation has been that while robot minds are rapidly evolving new behaviors through AI, their bodies remain closed systems, unable to systematically integrate new material to grow or heal. We argue that open-ended physical adaptation is only possible when robots are designed using only a small repertoire of simple modules. This allows machines to mechanically adapt by consuming parts from other machines or their surroundings and shedding broken components. We demonstrate this principle using a truss modular robot platform composed of one-dimensional actuated bars. We show how robots in this space can grow bigger, faster, and more capable by consuming materials from their environment and from other robots. We suggest that machine metabolic processes akin to the one demonstrated here will be an essential part of any sustained future robot ecology.
Belief Aided Navigation using Bayesian Reinforcement Learning for Avoiding Humans in Blind Spots
Mar 15, 2024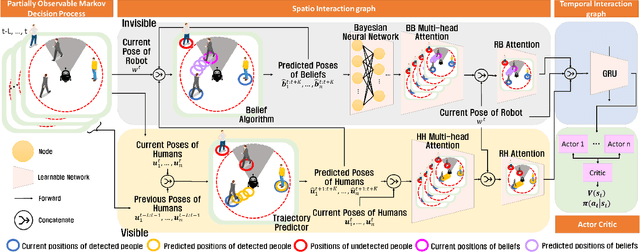
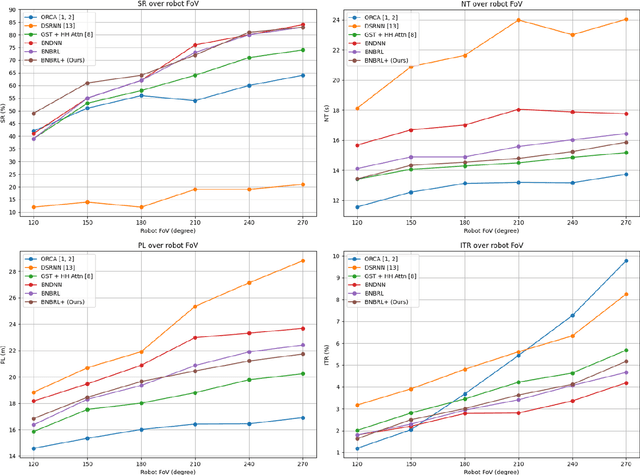
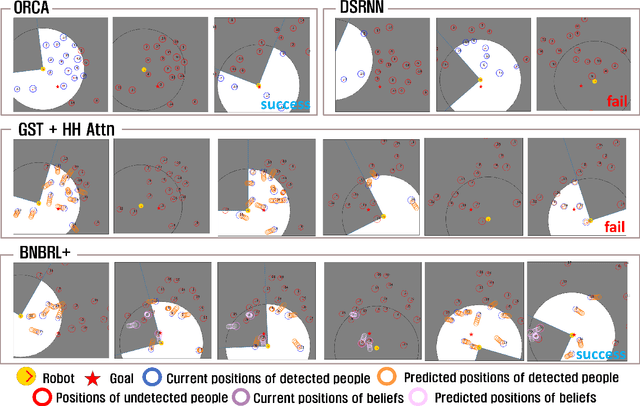
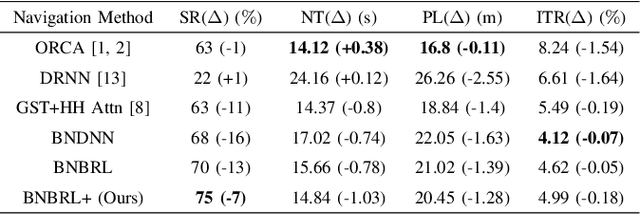
Recent research on mobile robot navigation has focused on socially aware navigation in crowded environments. However, existing methods do not adequately account for human robot interactions and demand accurate location information from omnidirectional sensors, rendering them unsuitable for practical applications. In response to this need, this study introduces a novel algorithm, BNBRL+, predicated on the partially observable Markov decision process framework to assess risks in unobservable areas and formulate movement strategies under uncertainty. BNBRL+ consolidates belief algorithms with Bayesian neural networks to probabilistically infer beliefs based on the positional data of humans. It further integrates the dynamics between the robot, humans, and inferred beliefs to determine the navigation paths and embeds social norms within the reward function, thereby facilitating socially aware navigation. Through experiments in various risk laden scenarios, this study validates the effectiveness of BNBRL+ in navigating crowded environments with blind spots. The model's ability to navigate effectively in spaces with limited visibility and avoid obstacles dynamically can significantly improve the safety and reliability of autonomous vehicles.
Transformable Gaussian Reward Function for Socially-Aware Navigation with Deep Reinforcement Learning
Feb 22, 2024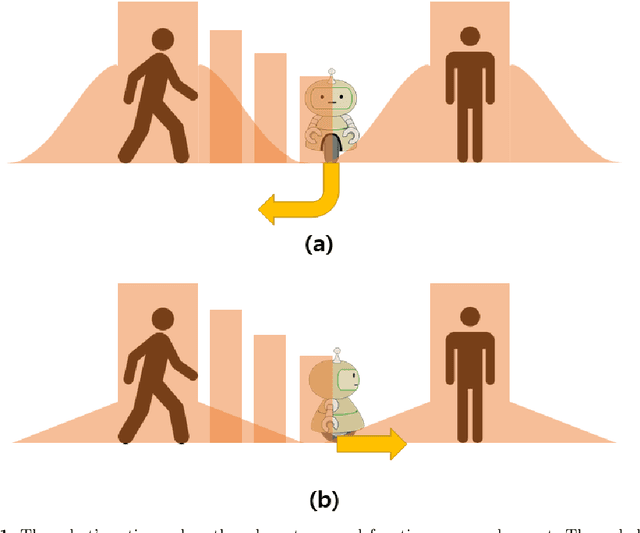
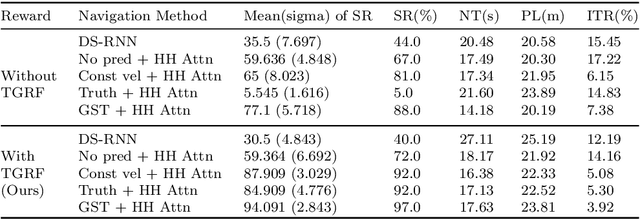
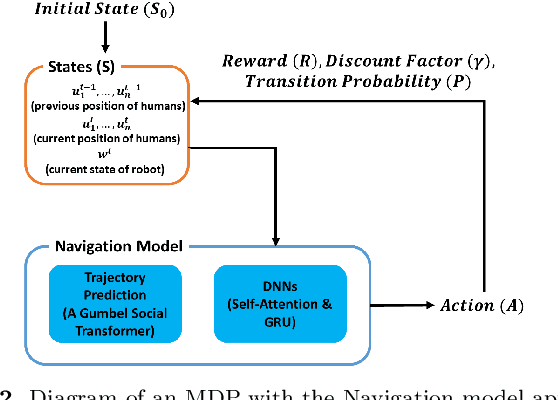
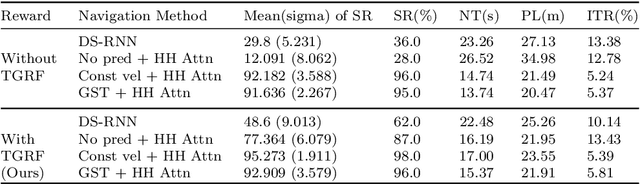
Robot navigation has transitioned from prioritizing obstacle avoidance to adopting socially aware navigation strategies that accommodate human presence. As a result, the recognition of socially aware navigation within dynamic human-centric environments has gained prominence in the field of robotics. Although reinforcement learning technique has fostered the advancement of socially aware navigation, defining appropriate reward functions, especially in congested environments, has posed a significant challenge. These rewards, crucial in guiding robot actions, demand intricate human-crafted design due to their complex nature and inability to be automatically set. The multitude of manually designed rewards poses issues with hyperparameter redundancy, imbalance, and inadequate representation of unique object characteristics. To address these challenges, we introduce a transformable gaussian reward function (TGRF). The TGRF significantly reduces the burden of hyperparameter tuning, displays adaptability across various reward functions, and demonstrates accelerated learning rates, particularly excelling in crowded environments utilizing deep reinforcement learning (DRL). We introduce and validate TGRF through sections highlighting its conceptual background, characteristics, experiments, and real-world application, paving the way for a more effective and adaptable approach in robotics.The complete source code is available on https://github.com/JinnnK/TGRF
DynaCon: Dynamic Robot Planner with Contextual Awareness via LLMs
Sep 27, 2023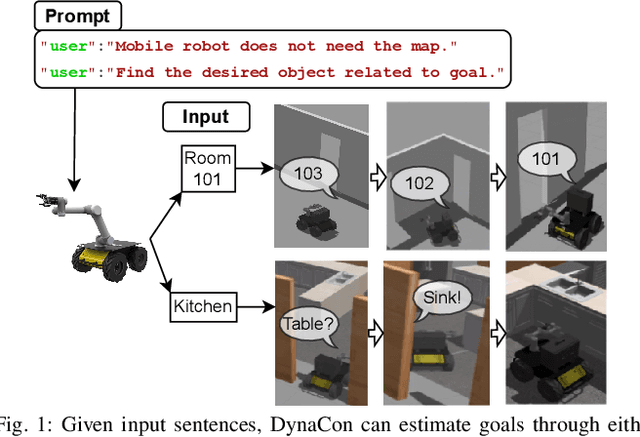
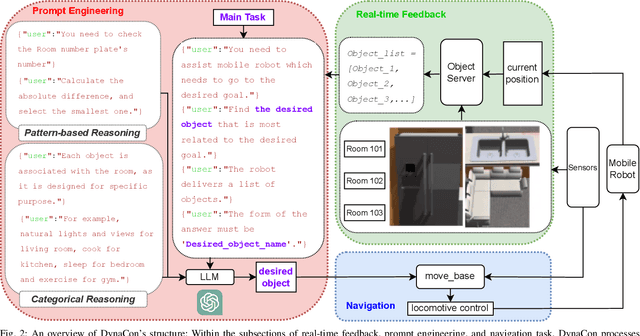
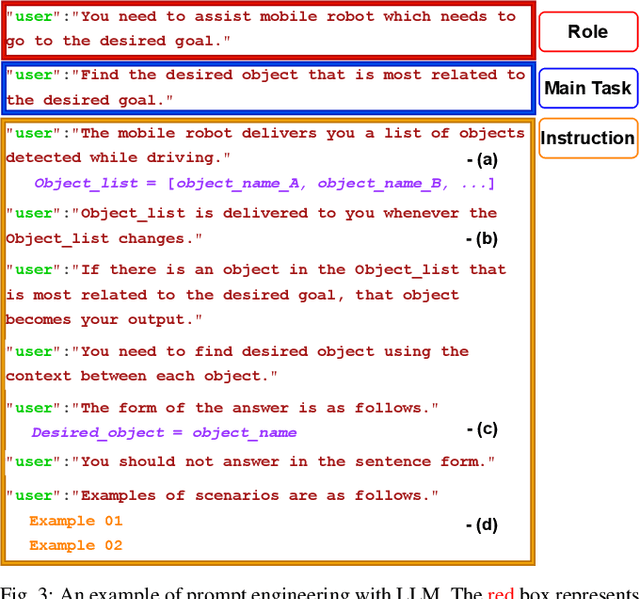
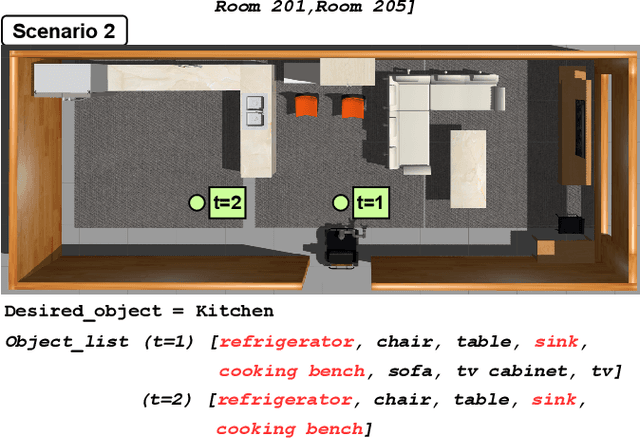
Mobile robots often rely on pre-existing maps for effective path planning and navigation. However, when these maps are unavailable, particularly in unfamiliar environments, a different approach become essential. This paper introduces DynaCon, a novel system designed to provide mobile robots with contextual awareness and dynamic adaptability during navigation, eliminating the reliance of traditional maps. DynaCon integrates real-time feedback with an object server, prompt engineering, and navigation modules. By harnessing the capabilities of Large Language Models (LLMs), DynaCon not only understands patterns within given numeric series but also excels at categorizing objects into matched spaces. This facilitates dynamic path planner imbued with contextual awareness. We validated the effectiveness of DynaCon through an experiment where a robot successfully navigated to its goal using reasoning. Source code and experiment videos for this work can be found at: https://sites.google.com/view/dynacon.
Deep learning-based statistical noise reduction for multidimensional spectral data
Jul 02, 2021



In spectroscopic experiments, data acquisition in multi-dimensional phase space may require long acquisition time, owing to the large phase space volume to be covered. In such case, the limited time available for data acquisition can be a serious constraint for experiments in which multidimensional spectral data are acquired. Here, taking angle-resolved photoemission spectroscopy (ARPES) as an example, we demonstrate a denoising method that utilizes deep learning as an intelligent way to overcome the constraint. With readily available ARPES data and random generation of training data set, we successfully trained the denoising neural network without overfitting. The denoising neural network can remove the noise in the data while preserving its intrinsic information. We show that the denoising neural network allows us to perform similar level of second-derivative and line shape analysis on data taken with two orders of magnitude less acquisition time. The importance of our method lies in its applicability to any multidimensional spectral data that are susceptible to statistical noise.
* 8 pages, 8 figures