 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBelief Aided Navigation using Bayesian Reinforcement Learning for Avoiding Humans in Blind Spots
Paper and Code
Mar 15, 2024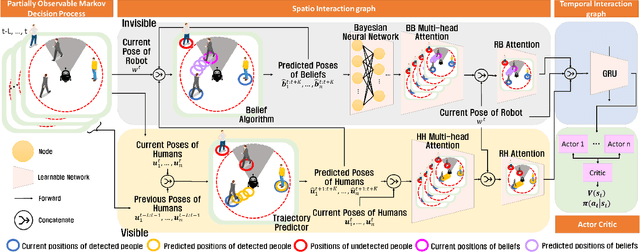
Recent research on mobile robot navigation has focused on socially aware navigation in crowded environments. However, existing methods do not adequately account for human robot interactions and demand accurate location information from omnidirectional sensors, rendering them unsuitable for practical applications. In response to this need, this study introduces a novel algorithm, BNBRL+, predicated on the partially observable Markov decision process framework to assess risks in unobservable areas and formulate movement strategies under uncertainty. BNBRL+ consolidates belief algorithms with Bayesian neural networks to probabilistically infer beliefs based on the positional data of humans. It further integrates the dynamics between the robot, humans, and inferred beliefs to determine the navigation paths and embeds social norms within the reward function, thereby facilitating socially aware navigation. Through experiments in various risk laden scenarios, this study validates the effectiveness of BNBRL+ in navigating crowded environments with blind spots. The model's ability to navigate effectively in spaces with limited visibility and avoid obstacles dynamically can significantly improve the safety and reliability of autonomous vehicles.