 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Cropping and Rotation: Automated Evolution of Powerful Task-Specific Augmentations with Generative Models
Feb 03, 2026Data augmentation has long been a cornerstone for reducing overfitting in vision models, with methods like AutoAugment automating the design of task-specific augmentations. Recent advances in generative models, such as conditional diffusion and few-shot NeRFs, offer a new paradigm for data augmentation by synthesizing data with significantly greater diversity and realism. However, unlike traditional augmentations like cropping or rotation, these methods introduce substantial changes that enhance robustness but also risk degrading performance if the augmentations are poorly matched to the task. In this work, we present EvoAug, an automated augmentation learning pipeline, which leverages these generative models alongside an efficient evolutionary algorithm to learn optimal task-specific augmentations. Our pipeline introduces a novel approach to image augmentation that learns stochastic augmentation trees that hierarchically compose augmentations, enabling more structured and adaptive transformations. We demonstrate strong performance across fine-grained classification and few-shot learning tasks. Notably, our pipeline discovers augmentations that align with domain knowledge, even in low-data settings. These results highlight the potential of learned generative augmentations, unlocking new possibilities for robust model training.
Robot Metabolism: Towards machines that can grow by consuming other machines
Nov 17, 2024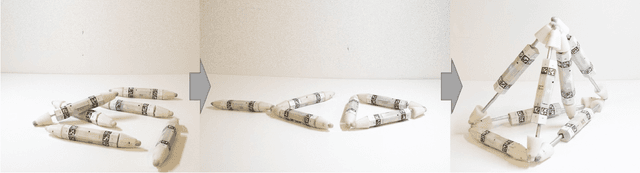
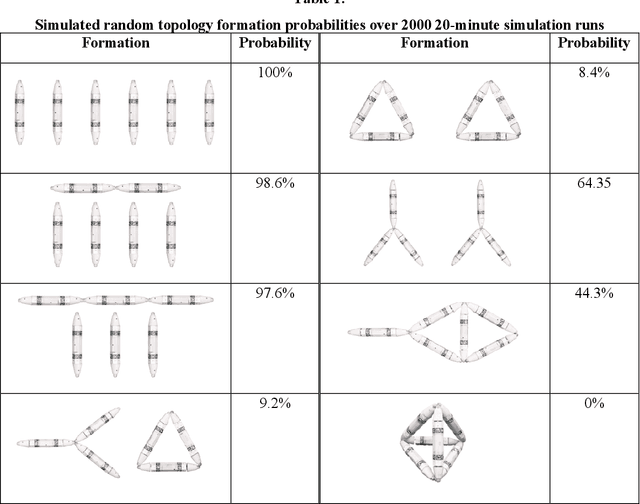
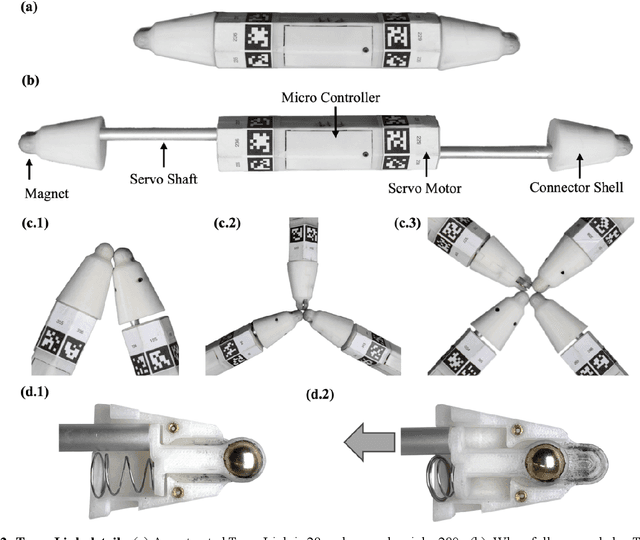
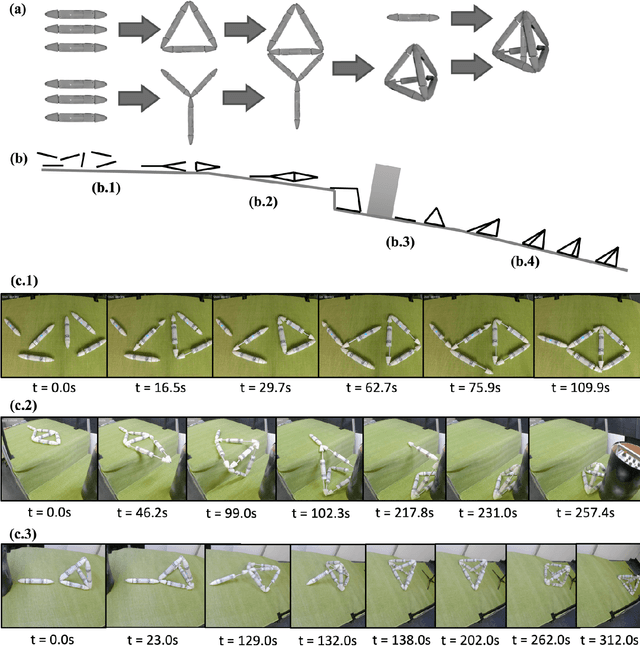
Biological lifeforms can heal, grow, adapt, and reproduce -- abilities essential for sustained survival and development. In contrast, robots today are primarily monolithic machines with limited ability to self-repair, physically develop, or incorporate material from their environments. A key challenge to such physical adaptation has been that while robot minds are rapidly evolving new behaviors through AI, their bodies remain closed systems, unable to systematically integrate new material to grow or heal. We argue that open-ended physical adaptation is only possible when robots are designed using only a small repertoire of simple modules. This allows machines to mechanically adapt by consuming parts from other machines or their surroundings and shedding broken components. We demonstrate this principle using a truss modular robot platform composed of one-dimensional actuated bars. We show how robots in this space can grow bigger, faster, and more capable by consuming materials from their environment and from other robots. We suggest that machine metabolic processes akin to the one demonstrated here will be an essential part of any sustained future robot ecology.