 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dataset and Benchmark for Shape Completion of Fruits for Agricultural Robotics
Jul 18, 2024As the population is expected to reach 10 billion by 2050, our agricultural production system needs to double its productivity despite a decline of human workforce in the agricultural sector. Autonomous robotic systems are one promising pathway to increase productivity by taking over labor-intensive manual tasks like fruit picking. To be effective, such systems need to monitor and interact with plants and fruits precisely, which is challenging due to the cluttered nature of agricultural environments causing, for example, strong occlusions. Thus, being able to estimate the complete 3D shapes of objects in presence of occlusions is crucial for automating operations such as fruit harvesting. In this paper, we propose the first publicly available 3D shape completion dataset for agricultural vision systems. We provide an RGB-D dataset for estimating the 3D shape of fruits. Specifically, our dataset contains RGB-D frames of single sweet peppers in lab conditions but also in a commercial greenhouse. For each fruit, we additionally collected high-precision point clouds that we use as ground truth. For acquiring the ground truth shape, we developed a measuring process that allows us to record data of real sweet pepper plants, both in the lab and in the greenhouse with high precision, and determine the shape of the sensed fruits. We release our dataset, consisting of almost 7000 RGB-D frames belonging to more than 100 different fruits. We provide segmented RGB-D frames, with camera instrinsics to easily obtain colored point clouds, together with the corresponding high-precision, occlusion-free point clouds obtained with a high-precision laser scanner. We additionally enable evaluation ofshape completion approaches on a hidden test set through a public challenge on a benchmark server.
BonnBot-I Plus: A Bio-diversity Aware Precise Weed Management Robotic Platform
May 15, 2024In this article, we focus on the critical tasks of plant protection in arable farms, addressing a modern challenge in agriculture: integrating ecological considerations into the operational strategy of precision weeding robots like \bbot. This article presents the recent advancements in weed management algorithms and the real-world performance of \bbot\ at the University of Bonn's Klein-Altendorf campus. We present a novel Rolling-view observation model for the BonnBot-Is weed monitoring section which leads to an average absolute weeding performance enhancement of $3.4\%$. Furthermore, for the first time, we show how precision weeding robots could consider bio-diversity-aware concerns in challenging weeding scenarios. We carried out comprehensive weeding experiments in sugar-beet fields, covering both weed-only and mixed crop-weed situations, and introduced a new dataset compatible with precision weeding. Our real-field experiments revealed that our weeding approach is capable of handling diverse weed distributions, with a minimal loss of only $11.66\%$ attributable to intervention planning and $14.7\%$ to vision system limitations highlighting required improvements of the vision system.
PAg-NeRF: Towards fast and efficient end-to-end panoptic 3D representations for agricultural robotics
Sep 11, 2023



Precise scene understanding is key for most robot monitoring and intervention tasks in agriculture. In this work we present PAg-NeRF which is a novel NeRF-based system that enables 3D panoptic scene understanding. Our representation is trained using an image sequence with noisy robot odometry poses and automatic panoptic predictions with inconsistent IDs between frames. Despite this noisy input, our system is able to output scene geometry, photo-realistic renders and 3D consistent panoptic representations with consistent instance IDs. We evaluate this novel system in a very challenging horticultural scenario and in doing so demonstrate an end-to-end trainable system that can make use of noisy robot poses rather than precise poses that have to be pre-calculated. Compared to a baseline approach the peak signal to noise ratio is improved from 21.34dB to 23.37dB while the panoptic quality improves from 56.65% to 70.08%. Furthermore, our approach is faster and can be tuned to improve inference time by more than a factor of 2 while being memory efficient with approximately 12 times fewer parameters.
Panoptic Mapping with Fruit Completion and Pose Estimation for Horticultural Robots
Mar 15, 2023



Monitoring plants and fruits at high resolution play a key role in the future of agriculture. Accurate 3D information can pave the way to a diverse number of robotic applications in agriculture ranging from autonomous harvesting to precise yield estimation. Obtaining such 3D information is non-trivial as agricultural environments are often repetitive and cluttered, and one has to account for the partial observability of fruit and plants. In this paper, we address the problem of jointly estimating complete 3D shapes of fruit and their pose in a 3D multi-resolution map built by a mobile robot. To this end, we propose an online multi-resolution panoptic mapping system where regions of interest are represented with a higher resolution. We exploit data to learn a general fruit shape representation that we use at inference time together with an occlusion-aware differentiable rendering pipeline to complete partial fruit observations and estimate the 7 DoF pose of each fruit in the map. The experiments presented in this paper, evaluated both in the controlled environment and in a commercial greenhouse, show that our novel algorithm yields higher completion and pose estimation accuracy than existing methods, with an improvement of 41% in completion accuracy and 52% in pose estimation accuracy while keeping a low inference time of 0.6s in average.
Explicitly incorporating spatial information to recurrent networks for agriculture
Jun 27, 2022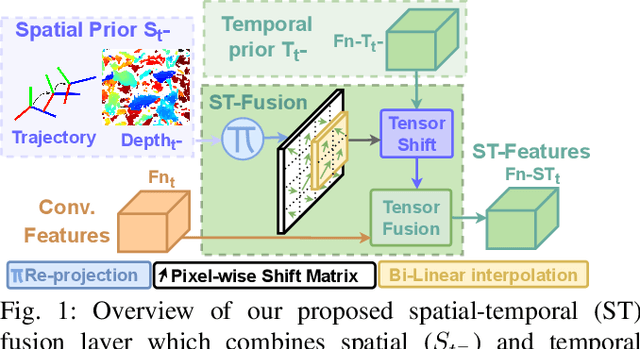
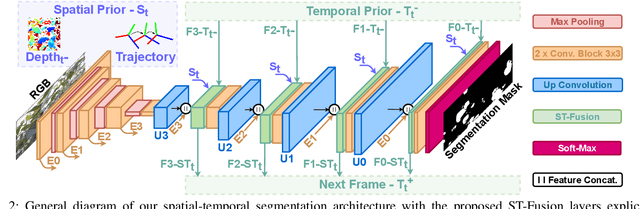
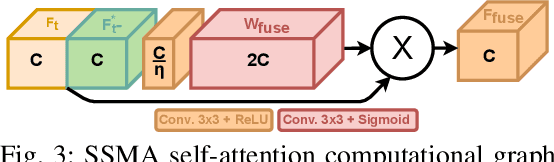
In agriculture, the majority of vision systems perform still image classification. Yet, recent work has highlighted the potential of spatial and temporal cues as a rich source of information to improve the classification performance. In this paper, we propose novel approaches to explicitly capture both spatial and temporal information to improve the classification of deep convolutional neural networks. We leverage available RGB-D images and robot odometry to perform inter-frame feature map spatial registration. This information is then fused within recurrent deep learnt models, to improve their accuracy and robustness. We demonstrate that this can considerably improve the classification performance with our best performing spatial-temporal model (ST-Atte) achieving absolute performance improvements for intersection-over-union (IoU[%]) of 4.7 for crop-weed segmentation and 2.6 for fruit (sweet pepper) segmentation. Furthermore, we show that these approaches are robust to variable framerates and odometry errors, which are frequently observed in real-world applications.
Viewpoint Planning for Fruit Size and Position Estimation
Oct 31, 2020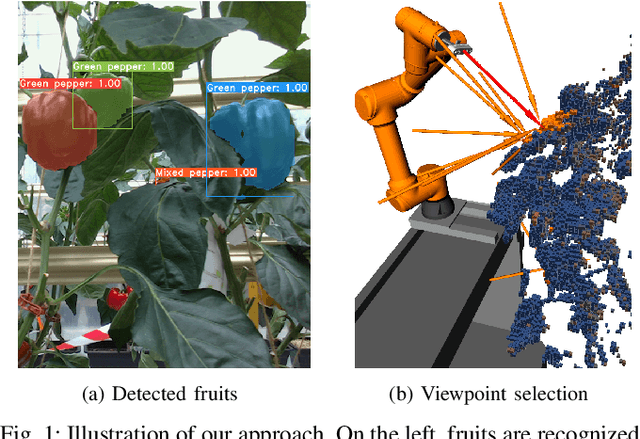
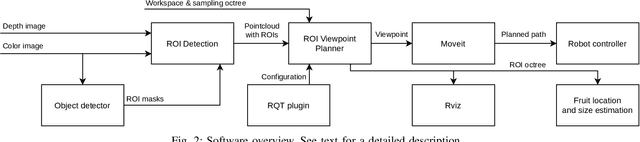
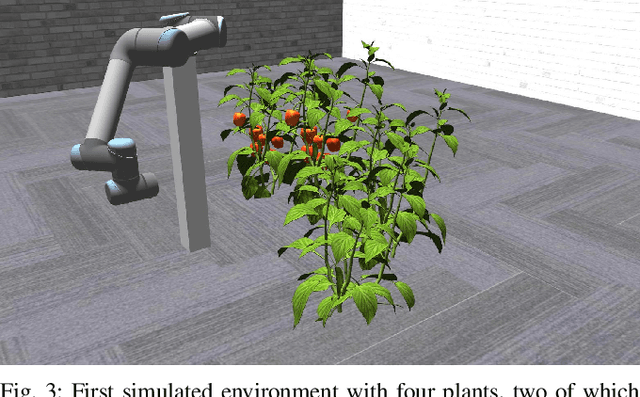
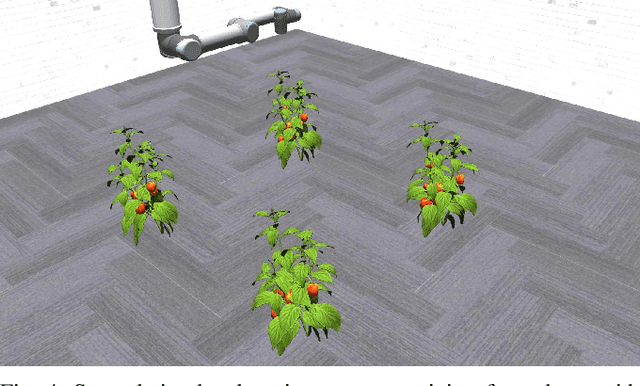
Modern agricultural applications require knowledge about position and size of fruits on plants. However, occlusions from leaves typically make obtaining this information difficult. We present a novel viewpoint planning approach that generates an octree of plants which marks the regions of interests, i.e., fruits. Our method uses this octree to sample viewpoints that increase the information around the fruit regions and estimates their position and size. Our planner is modular and provides different ways of obtaining the regions of interest and sampling candidate viewpoints. We evaluated our approach in simulated scenarios, where we compared the resulting fruit estimations with a known ground truth. The results demonstrate that our approach outperforms two different sampling methods that do not explicitly consider the regions of interest. Furthermore, we showed the real-world applicability by testing the framework on a robotic arm equipped with an RGB-D camera installed on an automated pipe-rail trolley in a capsicum glasshouse.
PATHoBot: A Robot for Glasshouse Crop Phenotyping and Intervention
Oct 30, 2020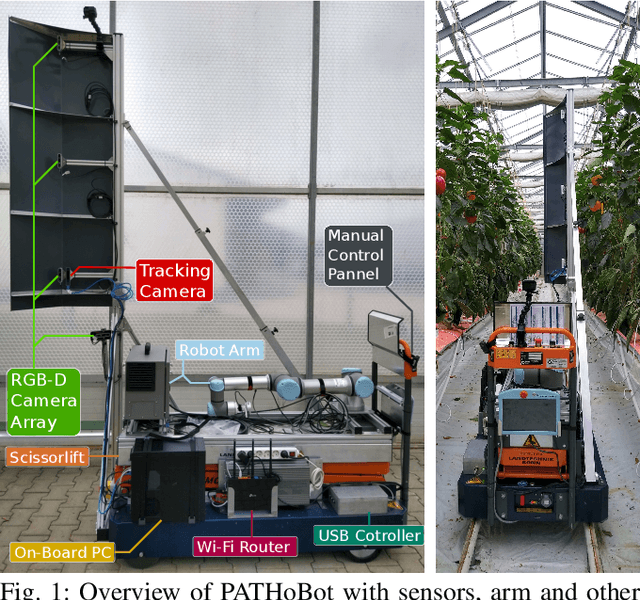

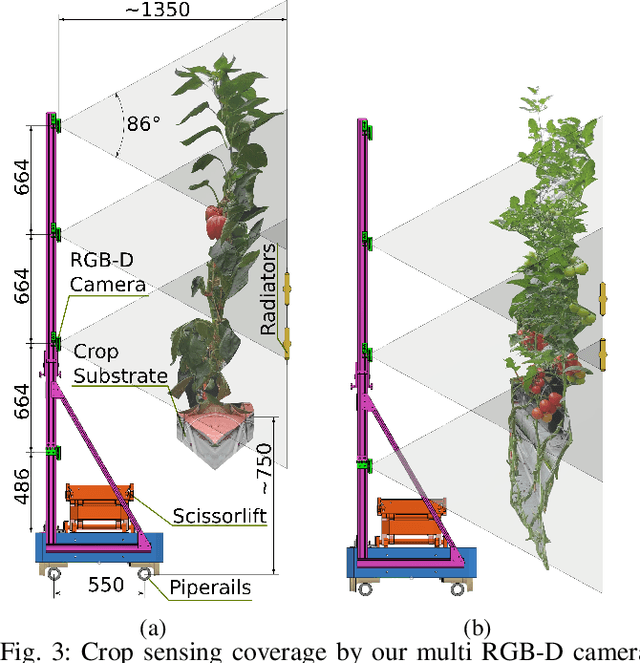

We present PATHoBot an autonomous crop surveying and intervention robot for glasshouse environments. The aim of this platform is to autonomously gather high quality data and also estimate key phenotypic parameters. To achieve this we retro-fit an off-the-shelf pipe-rail trolley with an array of multi-modal cameras, navigation sensors and a robotic arm for close surveying tasks and intervention. In this paper we describe PATHoBot design choices made to ensure proper operation in a commercial glasshouse environment. As a surveying platform we collect a number of datasets which include both sweet pepper and tomatoes. We show how PATHoBot enables novel surveillance approaches by first improving our previous work on fruit counting by incorporating wheel odometry and depth information. We find that by introducing re-projection and depth information we are able to achieve an absolute improvement of 20 points over the baseline technique in an "in the wild" situation. Finally, we present a 3D mapping case study, further showcasing PATHoBot's crop surveying capabilities.
SE-SLAM: Semi-Dense Structured Edge-Based Monocular SLAM
Sep 09, 2019



Vision-based Simultaneous Localization And Mapping (VSLAM) is a mature problem in Robotics. Most VSLAM systems are feature based methods, which are robust and present high accuracy, but yield sparse maps with limited application for further navigation tasks. Most recently, direct methods which operate directly on image intensity have been introduced, capable of reconstructing richer maps at the cost of higher processing power. In this work, an edge-based monocular SLAM system (SE-SLAM) is proposed as a middle point: edges present good localization as point features, while enabling a structural semidense map reconstruction. However, edges are not easy to associate, track and optimize over time, as they lack descriptors and biunivocal correspondence, unlike point features. To tackle these issues, this paper presents a method to match edges between frames in a consistent manner; a feasible strategy to solve the optimization problem, since its size rapidly increases when working with edges; and the use of non-linear optimization techniques. The resulting system achieves comparable precision to state of the art feature-based and dense/semi-dense systems, while inherently building a structural semi-dense reconstruction of the environment, providing relevant structure data for further navigation algorithms. To achieve such accuracy, state of the art non-linear optimization is needed, over a continuous feed of 10000 edgepoints per frame, to optimize the full semi-dense output. Despite its heavy processing requirements, the system achieves near to real-time operation, thanks to a custom built solver and parallelization of its key stages. In order to encourage further development of edge-based SLAM systems, SE-SLAM source code will be released as open source.