 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViewpoint Planning for Fruit Size and Position Estimation
Paper and Code
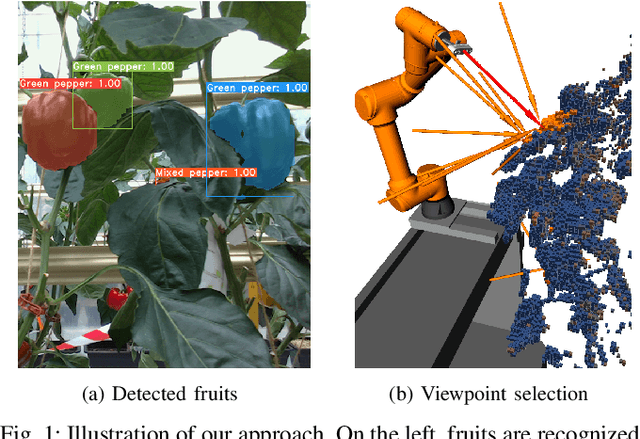
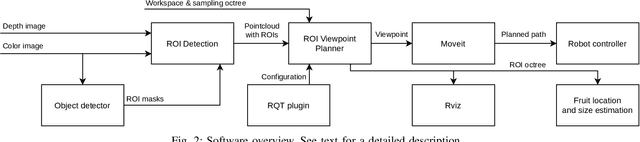
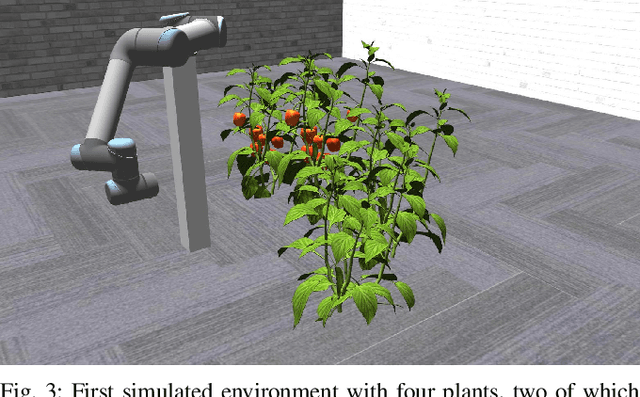
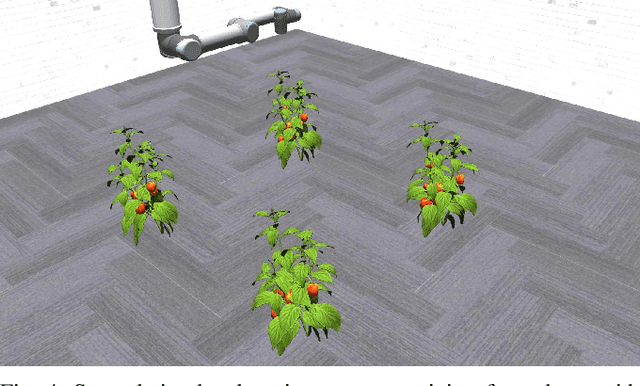
Modern agricultural applications require knowledge about position and size of fruits on plants. However, occlusions from leaves typically make obtaining this information difficult. We present a novel viewpoint planning approach that generates an octree of plants which marks the regions of interests, i.e., fruits. Our method uses this octree to sample viewpoints that increase the information around the fruit regions and estimates their position and size. Our planner is modular and provides different ways of obtaining the regions of interest and sampling candidate viewpoints. We evaluated our approach in simulated scenarios, where we compared the resulting fruit estimations with a known ground truth. The results demonstrate that our approach outperforms two different sampling methods that do not explicitly consider the regions of interest. Furthermore, we showed the real-world applicability by testing the framework on a robotic arm equipped with an RGB-D camera installed on an automated pipe-rail trolley in a capsicum glasshouse.