 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Surgical Robotics Research: Reviewing 10 Years of Research with the dVRK
May 13, 2021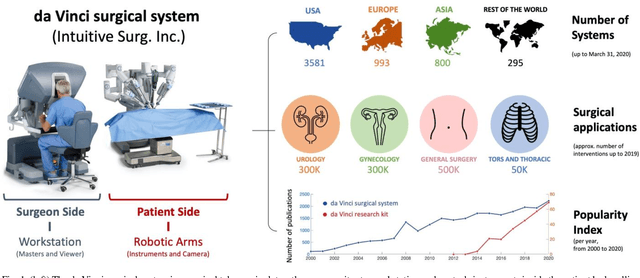
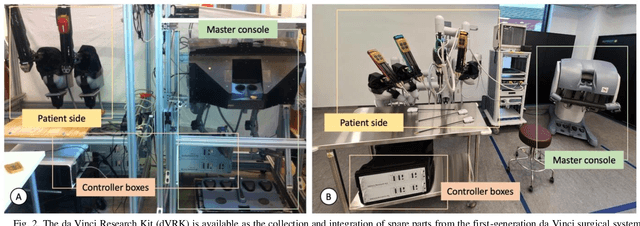
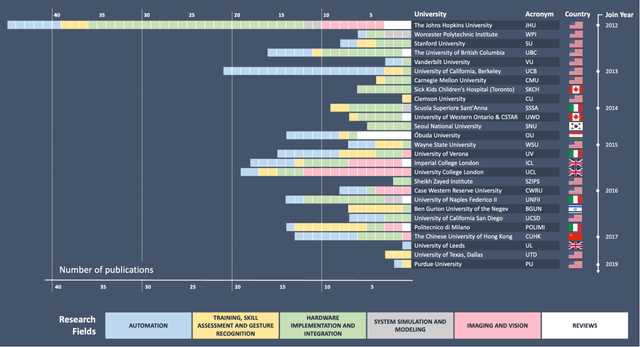
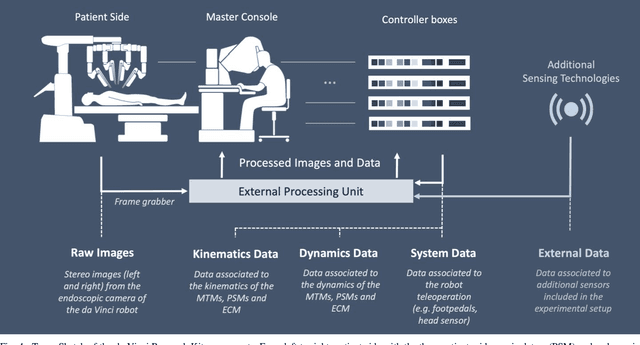
Robotic-assisted surgery is now well-established in clinical practice and has become the gold standard clinical treatment option for several clinical indications. The field of robotic-assisted surgery is expected to grow substantially in the next decade with a range of new robotic devices emerging to address unmet clinical needs across different specialities. A vibrant surgical robotics research community is pivotal for conceptualizing such new systems as well as for developing and training the engineers and scientists to translate them into practice. The da Vinci Research Kit (dVRK), an academic and industry collaborative effort to re-purpose decommissioned da Vinci surgical systems (Intuitive Surgical Inc, CA, USA) as a research platform for surgical robotics research, has been a key initiative for addressing a barrier to entry for new research groups in surgical robotics. In this paper, we present an extensive review of the publications that have been facilitated by the dVRK over the past decade. We classify research efforts into different categories and outline some of the major challenges and needs for the robotics community to maintain this initiative and build upon it.
Image Compositing for Segmentation of Surgical Tools without Manual Annotations
Feb 18, 2021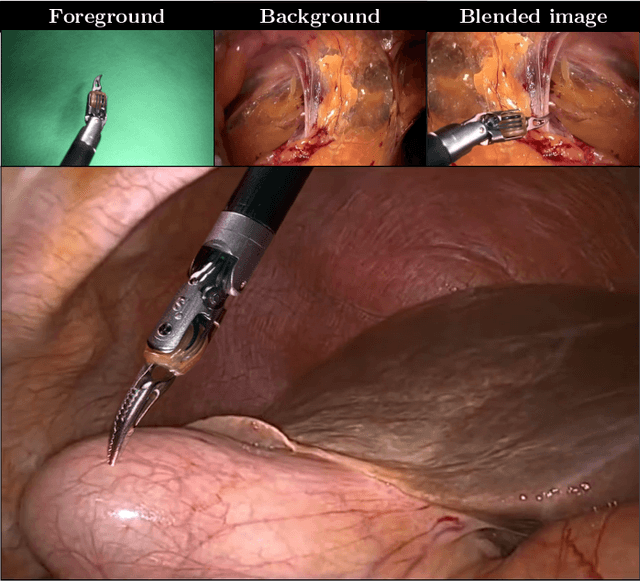
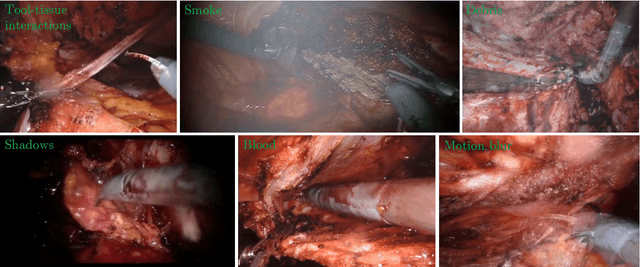
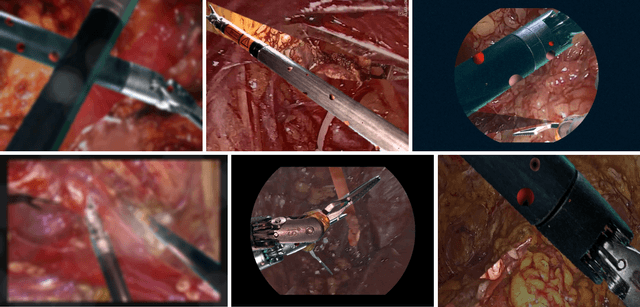
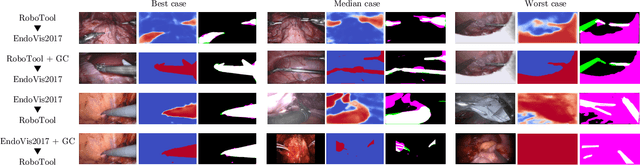
Producing manual, pixel-accurate, image segmentation labels is tedious and time-consuming. This is often a rate-limiting factor when large amounts of labeled images are required, such as for training deep convolutional networks for instrument-background segmentation in surgical scenes. No large datasets comparable to industry standards in the computer vision community are available for this task. To circumvent this problem, we propose to automate the creation of a realistic training dataset by exploiting techniques stemming from special effects and harnessing them to target training performance rather than visual appeal. Foreground data is captured by placing sample surgical instruments over a chroma key (a.k.a. green screen) in a controlled environment, thereby making extraction of the relevant image segment straightforward. Multiple lighting conditions and viewpoints can be captured and introduced in the simulation by moving the instruments and camera and modulating the light source. Background data is captured by collecting videos that do not contain instruments. In the absence of pre-existing instrument-free background videos, minimal labeling effort is required, just to select frames that do not contain surgical instruments from videos of surgical interventions freely available online. We compare different methods to blend instruments over tissue and propose a novel data augmentation approach that takes advantage of the plurality of options. We show that by training a vanilla U-Net on semi-synthetic data only and applying a simple post-processing, we are able to match the results of the same network trained on a publicly available manually labeled real dataset.
Automated pick-up of suturing needles for robotic surgical assistance
Apr 09, 2018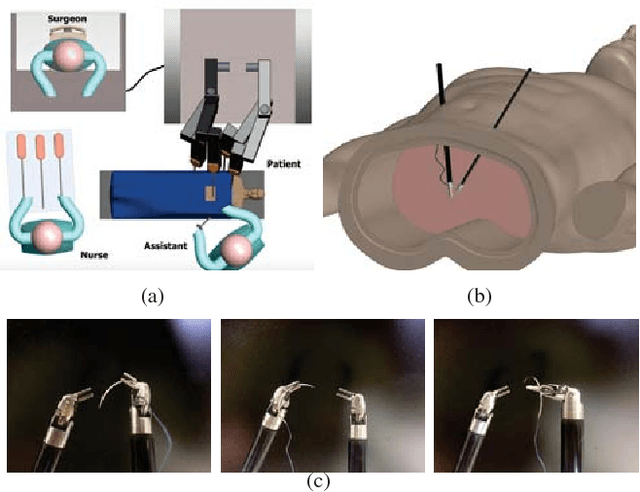
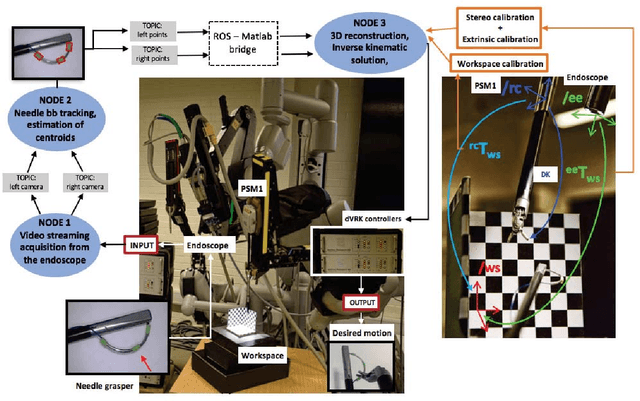
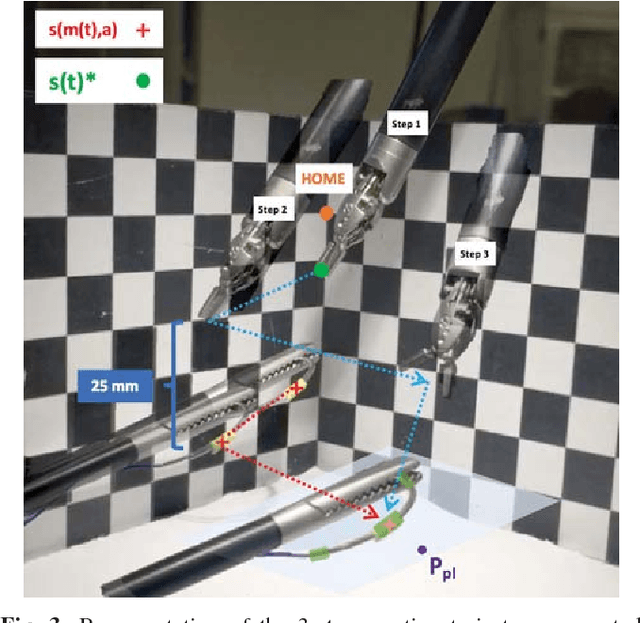
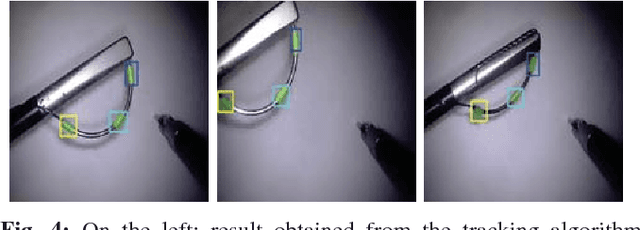
Robot-assisted laparoscopic prostatectomy (RALP) is a treatment for prostate cancer that involves complete or nerve sparing removal prostate tissue that contains cancer. After removal the bladder neck is successively sutured directly with the urethra. The procedure is called urethrovesical anastomosis and is one of the most dexterity demanding tasks during RALP. Two suturing instruments and a pair of needles are used in combination to perform a running stitch during urethrovesical anastomosis. While robotic instruments provide enhanced dexterity to perform the anastomosis, it is still highly challenging and difficult to learn. In this paper, we presents a vision-guided needle grasping method for automatically grasping the needle that has been inserted into the patient prior to anastomosis. We aim to automatically grasp the suturing needle in a position that avoids hand-offs and immediately enables the start of suturing. The full grasping process can be broken down into: a needle detection algorithm; an approach phase where the surgical tool moves closer to the needle based on visual feedback; and a grasping phase through path planning based on observed surgical practice. Our experimental results show examples of successful autonomous grasping that has the potential to simplify and decrease the operational time in RALP by assisting a small component of urethrovesical anastomosis.