 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEX-Mouse: A Low-cost Portable and Universal Interface with Force Feedback for Data Collection of Dexterous Robotic Hands
Apr 16, 2026Data-driven dexterous hand manipulation requires large-scale, physically consistent demonstration data. Simulation and video-based methods suffer from sim-to-real gaps and retargeting problems, while MoCap glove-based teleoperation systems require per-operator calibration and lack portability, as the robot hand is typically fixed to a stationary arm. Portable alternatives improve mobility but lack cross-platform and cross-operator compatibility. We present DEX-Mouse, a portable, calibration-free hand-held teleoperation interface with integrated kinesthetic force feedback, built from commercial off-the-shelf components under USD 150. The operator-agnostic design requires no calibration or structural modification, enabling immediate deployment across diverse environments and platforms. The interface supports a configuration in which the target robot hand is mounted directly on the forearm of an operator, producing robot-aligned data. In a comparative user study across various dexterous manipulation tasks, operators using the proposed system achieved an 86.67% task completion rate under the attached configuration. Also, we found that the attached configuration reduced the perceived workload of the operators compared to spatially separated teleoperation setups across all compared interfaces. The complete hardware and software stack, including bill of materials, CAD models, and firmware, is open-sourced at https://dex-mouse.github.io/ to facilitate replication and adoption.
Why Look at It at All?: Vision-Free Multifingered Blind Grasping Using Uniaxial Fingertip Force Sensing
Feb 07, 2026Grasping under limited sensing remains a fundamental challenge for real-world robotic manipulation, as vision and high-resolution tactile sensors often introduce cost, fragility, and integration complexity. This work demonstrates that reliable multifingered grasping can be achieved under extremely minimal sensing by relying solely on uniaxial fingertip force feedback and joint proprioception, without vision or multi-axis/tactile sensing. To enable such blind grasping, we employ an efficient teacher-student training pipeline in which a reinforcement-learned teacher exploits privileged simulation-only observations to generate demonstrations for distilling a transformer-based student policy operating under partial observation. The student policy is trained to act using only sensing modalities available at real-world deployment. We validate the proposed approach on real hardware across 18 objects, including both in-distribution and out-of-distribution cases, achieving a 98.3~$\%$ overall grasp success rate. These results demonstrate strong robustness and generalization beyond the simulation training distribution, while significantly reducing sensing requirements for real-world grasping systems.
Repulsive Trajectory Modification and Conflict Resolution for Efficient Multi-Manipulator Motion Planning
Sep 17, 2025We propose an efficient motion planning method designed to efficiently find collision-free trajectories for multiple manipulators. While multi-manipulator systems offer significant advantages, coordinating their motions is computationally challenging owing to the high dimensionality of their composite configuration space. Conflict-Based Search (CBS) addresses this by decoupling motion planning, but suffers from subsequent conflicts incurred by resolving existing conflicts, leading to an exponentially growing constraint tree of CBS. Our proposed method is based on repulsive trajectory modification within the two-level structure of CBS. Unlike conventional CBS variants, the low-level planner applies a gradient descent approach using an Artificial Potential Field. This field generates repulsive forces that guide the trajectory of the conflicting manipulator away from those of other robots. As a result, subsequent conflicts are less likely to occur. Additionally, we develop a strategy that, under a specific condition, directly attempts to find a conflict-free solution in a single step without growing the constraint tree. Through extensive tests including physical robot experiments, we demonstrate that our method consistently reduces the number of expanded nodes in the constraint tree, achieves a higher success rate, and finds a solution faster compared to Enhanced CBS and other state-of-the-art algorithms.
Very Large-scale Multi-Robot Task Allocation in Challenging Environments via Robot Redistribution
Jun 08, 2025We consider the Multi-Robot Task Allocation (MRTA) problem that aims to optimize an assignment of multiple robots to multiple tasks in challenging environments which are with densely populated obstacles and narrow passages. In such environments, conventional methods optimizing the sum-of-cost are often ineffective because the conflicts between robots incur additional costs (e.g., collision avoidance, waiting). Also, an allocation that does not incorporate the actual robot paths could cause deadlocks, which significantly degrade the collective performance of the robots. We propose a scalable MRTA method that considers the paths of the robots to avoid collisions and deadlocks which result in a fast completion of all tasks (i.e., minimizing the \textit{makespan}). To incorporate robot paths into task allocation, the proposed method constructs a roadmap using a Generalized Voronoi Diagram. The method partitions the roadmap into several components to know how to redistribute robots to achieve all tasks with less conflicts between the robots. In the redistribution process, robots are transferred to their final destinations according to a push-pop mechanism with the first-in first-out principle. From the extensive experiments, we show that our method can handle instances with hundreds of robots in dense clutter while competitors are unable to compute a solution within a time limit.
Understanding Physical Properties of Unseen Deformable Objects by Leveraging Large Language Models and Robot Actions
Jun 04, 2025In this paper, we consider the problem of understanding the physical properties of unseen objects through interactions between the objects and a robot. Handling unseen objects with special properties such as deformability is challenging for traditional task and motion planning approaches as they are often with the closed world assumption. Recent results in Large Language Models (LLMs) based task planning have shown the ability to reason about unseen objects. However, most studies assume rigid objects, overlooking their physical properties. We propose an LLM-based method for probing the physical properties of unseen deformable objects for the purpose of task planning. For a given set of object properties (e.g., foldability, bendability), our method uses robot actions to determine the properties by interacting with the objects. Based on the properties examined by the LLM and robot actions, the LLM generates a task plan for a specific domain such as object packing. In the experiment, we show that the proposed method can identify properties of deformable objects, which are further used for a bin-packing task where the properties take crucial roles to succeed.
Enhancing Safety of Foundation Models for Visual Navigation through Collision Avoidance via Repulsive Estimation
Jun 04, 2025We propose CARE (Collision Avoidance via Repulsive Estimation), a plug-and-play module that enhances the safety of vision-based navigation without requiring additional range sensors or fine-tuning of pretrained models. While recent foundation models using only RGB inputs have shown strong performance, they often fail to generalize in out-of-distribution (OOD) environments with unseen objects or variations in camera parameters (e.g., field of view, pose, or focal length). Without fine-tuning, these models may generate unsafe trajectories that lead to collisions, requiring costly data collection and retraining. CARE addresses this limitation by seamlessly integrating with any RGB-based navigation system that outputs local trajectories, dynamically adjusting them using repulsive force vectors derived from monocular depth maps. We evaluate CARE by combining it with state-of-the-art vision-based navigation models across multiple robot platforms. CARE consistently reduces collision rates (up to 100%) without sacrificing goal-reaching performance and improves collision-free travel distance by up to 10.7x in exploration tasks.
Grasping Deformable Objects via Reinforcement Learning with Cross-Modal Attention to Visuo-Tactile Inputs
Apr 22, 2025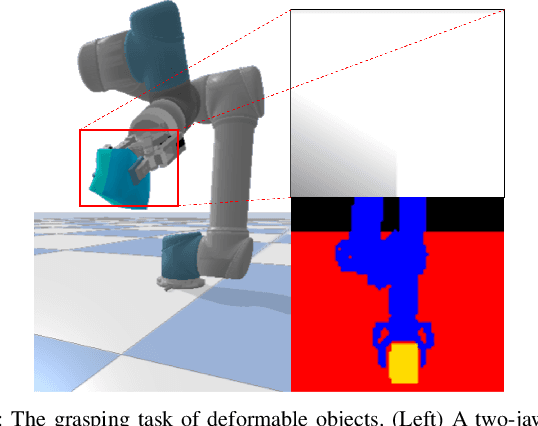
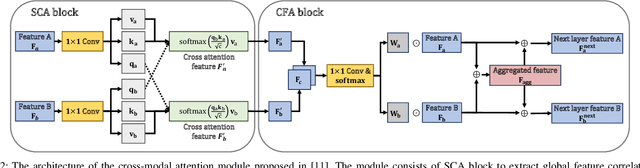
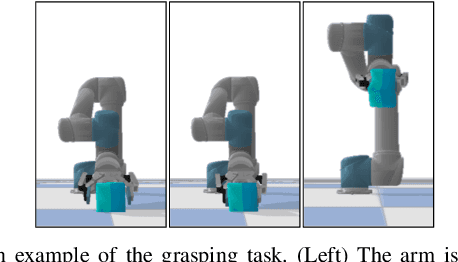
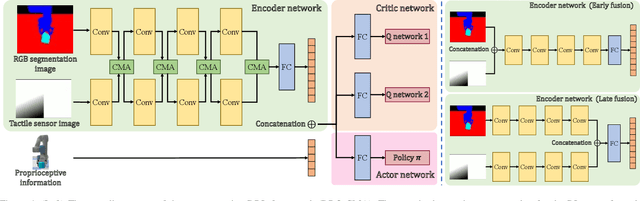
We consider the problem of grasping deformable objects with soft shells using a robotic gripper. Such objects have a center-of-mass that changes dynamically and are fragile so prone to burst. Thus, it is difficult for robots to generate appropriate control inputs not to drop or break the object while performing manipulation tasks. Multi-modal sensing data could help understand the grasping state through global information (e.g., shapes, pose) from visual data and local information around the contact (e.g., pressure) from tactile data. Although they have complementary information that can be beneficial to use together, fusing them is difficult owing to their different properties. We propose a method based on deep reinforcement learning (DRL) that generates control inputs of a simple gripper from visuo-tactile sensing information. Our method employs a cross-modal attention module in the encoder network and trains it in a self-supervised manner using the loss function of the RL agent. With the multi-modal fusion, the proposed method can learn the representation for the DRL agent from the visuo-tactile sensory data. The experimental result shows that cross-modal attention is effective to outperform other early and late data fusion methods across different environments including unseen robot motions and objects.
Merry-Go-Round: Safe Control of Decentralized Multi-Robot Systems with Deadlock Prevention
Mar 07, 2025We propose a hybrid approach for decentralized multi-robot navigation that ensures both safety and deadlock prevention. Building on a standard control formulation, we add a lightweight deadlock prevention mechanism by forming temporary "roundabouts" (circular reference paths). Each robot relies only on local, peer-to-peer communication and a controller for base collision avoidance; a roundabout is generated or joined on demand to avert deadlocks. Robots in the roundabout travel in one direction until an escape condition is met, allowing them to return to goal-oriented motion. Unlike classical decentralized methods that lack explicit deadlock resolution, our roundabout maneuver ensures system-wide forward progress while preserving safety constraints. Extensive simulations and physical robot experiments show that our method consistently outperforms or matches the success and arrival rates of other decentralized control approaches, particularly in cluttered or high-density scenarios, all with minimal centralized coordination.
Stop-N-Go: Search-based Conflict Resolution for Motion Planning of Multiple Robotic Manipulators
Oct 10, 2024We address the motion planning problem for multiple robotic manipulators in packed environments where shared workspace can result in goal positions occupied or blocked by other robots unless those other robots move away to make the goal positions free. While planning in a coupled configuration space (C-space) is straightforward, it struggles to scale with the number of robots and often fails to find solutions. Decoupled planning is faster but frequently leads to conflicts between trajectories. We propose a conflict resolution approach that inserts pauses into individually planned trajectories using an A* search strategy to minimize the makespan--the total time until all robots complete their tasks. This method allows some robots to stop, enabling others to move without collisions, and maintains short distances in the C-space. It also effectively handles cases where goal positions are initially blocked by other robots. Experimental results show that our method successfully solves challenging instances where baseline methods fail to find feasible solutions.
Escaping Local Minima: Hybrid Artificial Potential Field with Wall-Follower for Decentralized Multi-Robot Navigation
Sep 16, 2024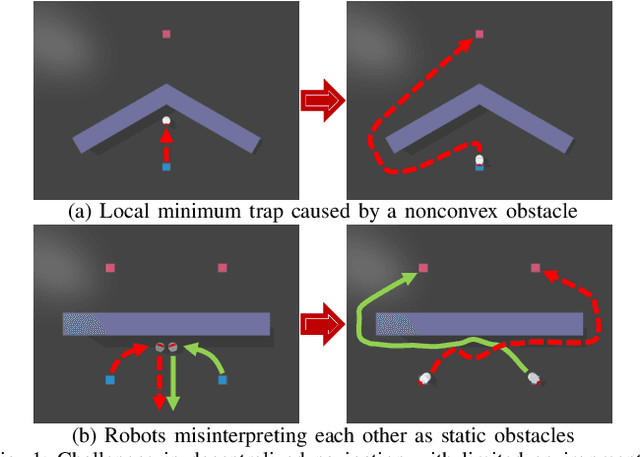
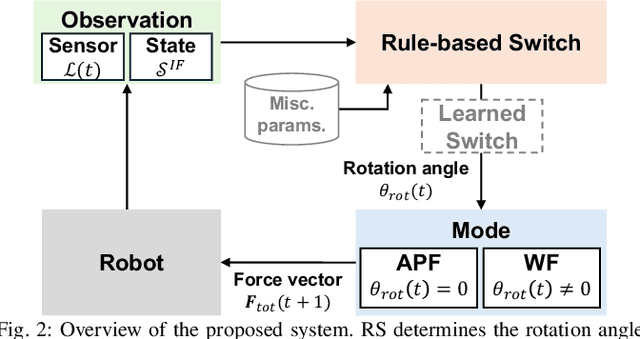
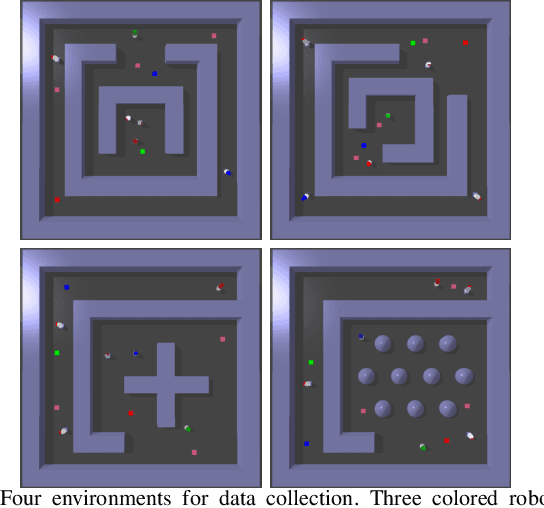
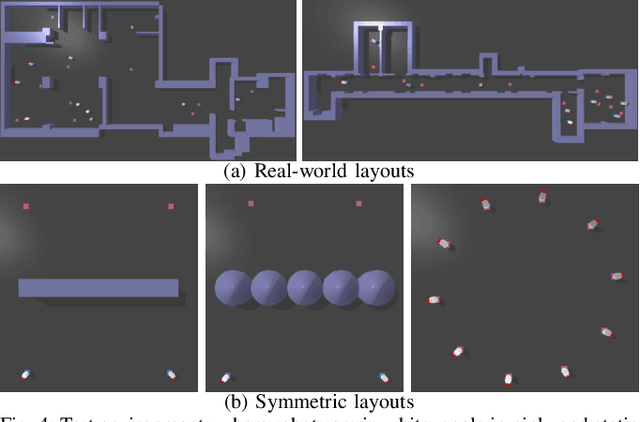
We tackle the challenges of decentralized multi-robot navigation in environments with nonconvex obstacles, where complete environmental knowledge is unavailable. While reactive methods like Artificial Potential Field (APF) offer simplicity and efficiency, they suffer from local minima, causing robots to become trapped due to their lack of global environmental awareness. Other existing solutions either rely on inter-robot communication, are limited to single-robot scenarios, or struggle to overcome nonconvex obstacles effectively. Our proposed methods enable collision-free navigation using only local sensor and state information without a map. By incorporating a wall-following (WF) behavior into the APF approach, our method allows robots to escape local minima, even in the presence of nonconvex and dynamic obstacles including other robots. We introduce two algorithms for switching between APF and WF: a rule-based system and an encoder network trained on expert demonstrations. Experimental results show that our approach achieves substantially higher success rates compared to state-of-the-art methods, highlighting its ability to overcome the limitations of local minima in complex environments