 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVery Large-scale Multi-Robot Task Allocation in Challenging Environments via Robot Redistribution
Jun 08, 2025We consider the Multi-Robot Task Allocation (MRTA) problem that aims to optimize an assignment of multiple robots to multiple tasks in challenging environments which are with densely populated obstacles and narrow passages. In such environments, conventional methods optimizing the sum-of-cost are often ineffective because the conflicts between robots incur additional costs (e.g., collision avoidance, waiting). Also, an allocation that does not incorporate the actual robot paths could cause deadlocks, which significantly degrade the collective performance of the robots. We propose a scalable MRTA method that considers the paths of the robots to avoid collisions and deadlocks which result in a fast completion of all tasks (i.e., minimizing the \textit{makespan}). To incorporate robot paths into task allocation, the proposed method constructs a roadmap using a Generalized Voronoi Diagram. The method partitions the roadmap into several components to know how to redistribute robots to achieve all tasks with less conflicts between the robots. In the redistribution process, robots are transferred to their final destinations according to a push-pop mechanism with the first-in first-out principle. From the extensive experiments, we show that our method can handle instances with hundreds of robots in dense clutter while competitors are unable to compute a solution within a time limit.
Enhancing Safety of Foundation Models for Visual Navigation through Collision Avoidance via Repulsive Estimation
Jun 04, 2025We propose CARE (Collision Avoidance via Repulsive Estimation), a plug-and-play module that enhances the safety of vision-based navigation without requiring additional range sensors or fine-tuning of pretrained models. While recent foundation models using only RGB inputs have shown strong performance, they often fail to generalize in out-of-distribution (OOD) environments with unseen objects or variations in camera parameters (e.g., field of view, pose, or focal length). Without fine-tuning, these models may generate unsafe trajectories that lead to collisions, requiring costly data collection and retraining. CARE addresses this limitation by seamlessly integrating with any RGB-based navigation system that outputs local trajectories, dynamically adjusting them using repulsive force vectors derived from monocular depth maps. We evaluate CARE by combining it with state-of-the-art vision-based navigation models across multiple robot platforms. CARE consistently reduces collision rates (up to 100%) without sacrificing goal-reaching performance and improves collision-free travel distance by up to 10.7x in exploration tasks.
Merry-Go-Round: Safe Control of Decentralized Multi-Robot Systems with Deadlock Prevention
Mar 07, 2025We propose a hybrid approach for decentralized multi-robot navigation that ensures both safety and deadlock prevention. Building on a standard control formulation, we add a lightweight deadlock prevention mechanism by forming temporary "roundabouts" (circular reference paths). Each robot relies only on local, peer-to-peer communication and a controller for base collision avoidance; a roundabout is generated or joined on demand to avert deadlocks. Robots in the roundabout travel in one direction until an escape condition is met, allowing them to return to goal-oriented motion. Unlike classical decentralized methods that lack explicit deadlock resolution, our roundabout maneuver ensures system-wide forward progress while preserving safety constraints. Extensive simulations and physical robot experiments show that our method consistently outperforms or matches the success and arrival rates of other decentralized control approaches, particularly in cluttered or high-density scenarios, all with minimal centralized coordination.
Safe Interval RRT* for Scalable Multi-Robot Path Planning in Continuous Space
Apr 02, 2024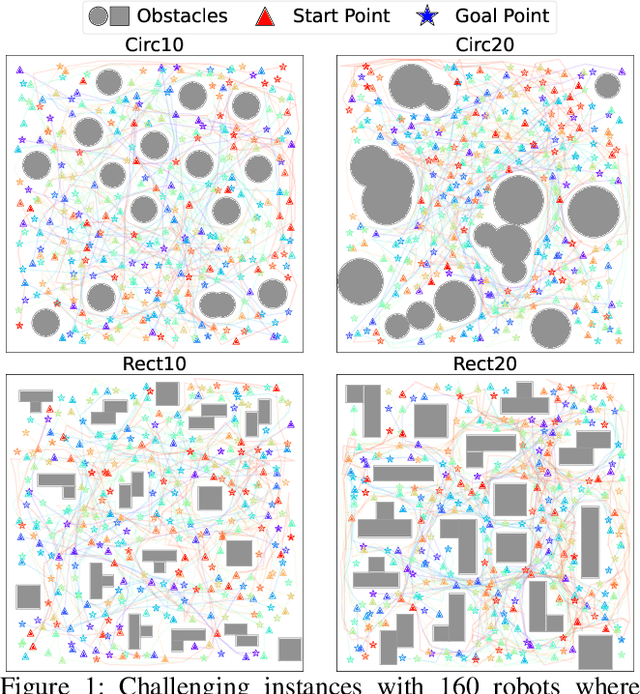
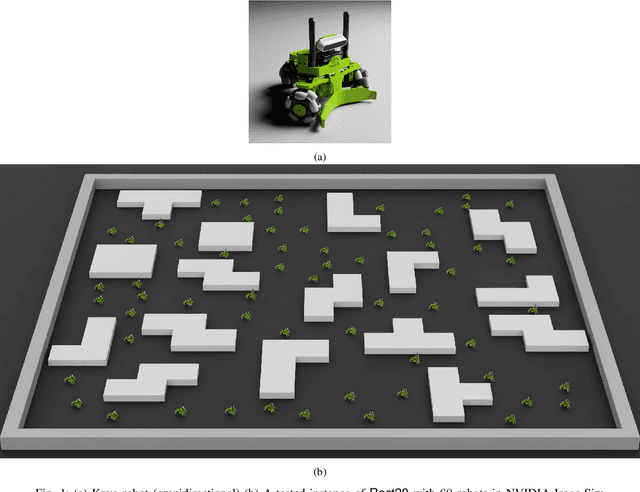
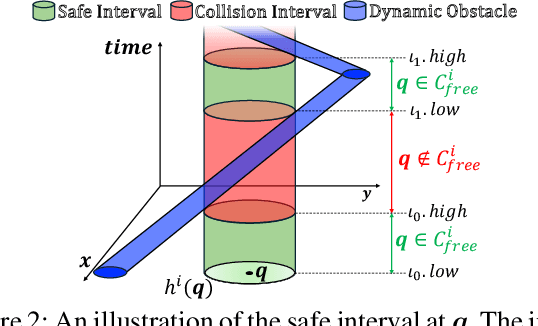
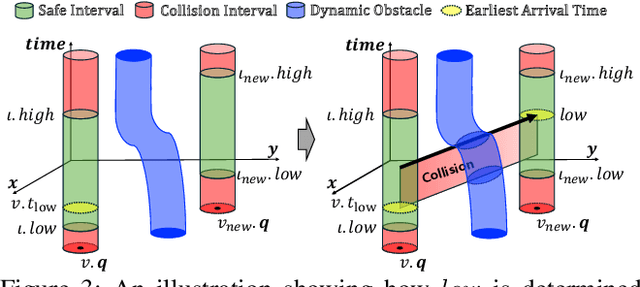
In this paper, we consider the problem of Multi-Robot Path Planning (MRPP) in continuous space to find conflict-free paths. The difficulty of the problem arises from two primary factors. First, the involvement of multiple robots leads to combinatorial decision-making, which escalates the search space exponentially. Second, the continuous space presents potentially infinite states and actions. For this problem, we propose a two-level approach where the low level is a sampling-based planner Safe Interval RRT* (SI-RRT*) that finds a collision-free trajectory for individual robots. The high level can use any method that can resolve inter-robot conflicts where we employ two representative methods that are Prioritized Planning (SI-CPP) and Conflict Based Search (SI-CCBS). Experimental results show that SI-RRT* can find a high-quality solution quickly with a small number of samples. SI-CPP exhibits improved scalability while SI-CCBS produces higher-quality solutions compared to the state-of-the-art planners for continuous space. Compared to the most scalable existing algorithm, SI-CPP achieves a success rate that is up to 94% higher with 100 robots while maintaining solution quality (i.e., flowtime, the sum of travel times of all robots) without significant compromise. SI-CPP also decreases the makespan up to 45%. SI-CCBS decreases the flowtime by 9% compared to the competitor, albeit exhibiting a 14% lower success rate.