 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMerry-Go-Round: Safe Control of Decentralized Multi-Robot Systems with Deadlock Prevention
Mar 07, 2025We propose a hybrid approach for decentralized multi-robot navigation that ensures both safety and deadlock prevention. Building on a standard control formulation, we add a lightweight deadlock prevention mechanism by forming temporary "roundabouts" (circular reference paths). Each robot relies only on local, peer-to-peer communication and a controller for base collision avoidance; a roundabout is generated or joined on demand to avert deadlocks. Robots in the roundabout travel in one direction until an escape condition is met, allowing them to return to goal-oriented motion. Unlike classical decentralized methods that lack explicit deadlock resolution, our roundabout maneuver ensures system-wide forward progress while preserving safety constraints. Extensive simulations and physical robot experiments show that our method consistently outperforms or matches the success and arrival rates of other decentralized control approaches, particularly in cluttered or high-density scenarios, all with minimal centralized coordination.
Escaping Local Minima: Hybrid Artificial Potential Field with Wall-Follower for Decentralized Multi-Robot Navigation
Sep 16, 2024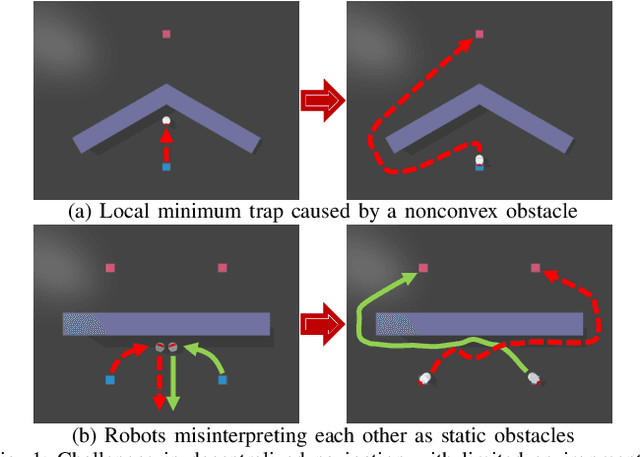
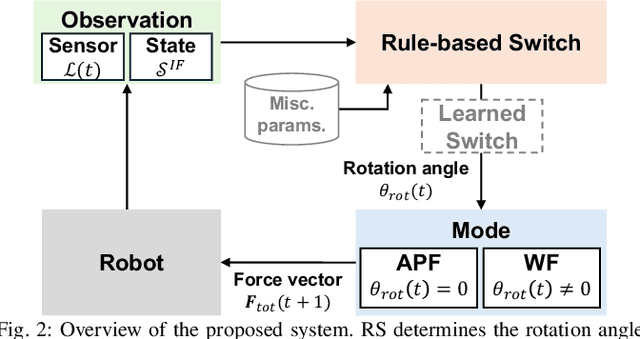
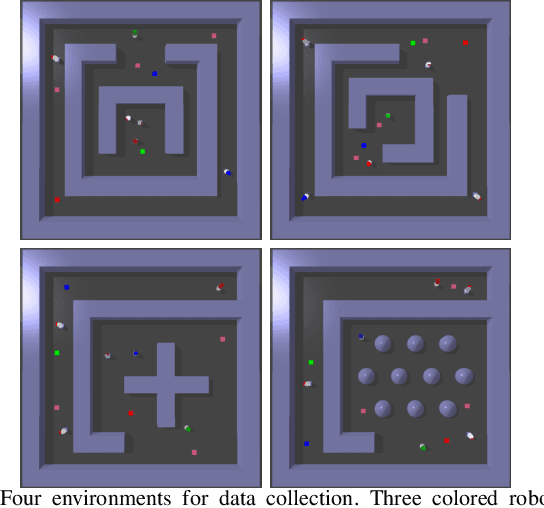
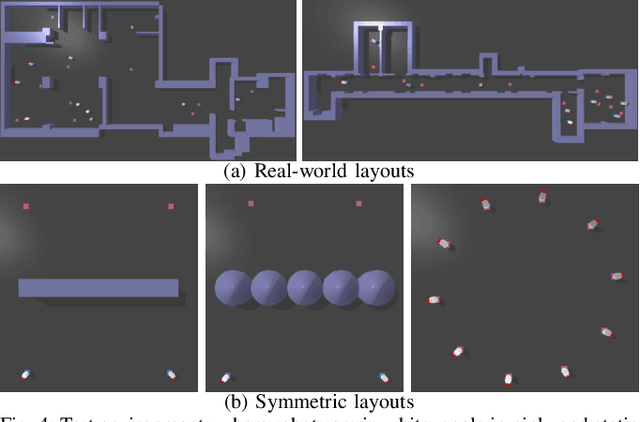
We tackle the challenges of decentralized multi-robot navigation in environments with nonconvex obstacles, where complete environmental knowledge is unavailable. While reactive methods like Artificial Potential Field (APF) offer simplicity and efficiency, they suffer from local minima, causing robots to become trapped due to their lack of global environmental awareness. Other existing solutions either rely on inter-robot communication, are limited to single-robot scenarios, or struggle to overcome nonconvex obstacles effectively. Our proposed methods enable collision-free navigation using only local sensor and state information without a map. By incorporating a wall-following (WF) behavior into the APF approach, our method allows robots to escape local minima, even in the presence of nonconvex and dynamic obstacles including other robots. We introduce two algorithms for switching between APF and WF: a rule-based system and an encoder network trained on expert demonstrations. Experimental results show that our approach achieves substantially higher success rates compared to state-of-the-art methods, highlighting its ability to overcome the limitations of local minima in complex environments