 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaBERT:A Padding Safe Interleaved Transformer Mamba Hybrid Encoder for Efficient Extended Context Masked Language Modeling
Mar 03, 2026Self attention encoders such as Bidirectional Encoder Representations from Transformers(BERT) scale quadratically with sequence length, making long context modeling expensive. Linear time state space models, such as Mamba, are efficient; however, they show limitations in modeling global interactions and can suffer from padding induced state contamination. We propose MaBERT, a hybrid encoder that interleaves Transformer layers for global dependency modeling with Mamba layers for linear time state updates. This design alternates global contextual integration with fast state accumulation, enabling efficient training and inference on long inputs. To stabilize variable length batching, we introduce paddingsafe masking, which blocks state propagation through padded positions, and mask aware attention pooling, which aggregates information only from valid tokens. On GLUE, MaBERT achieves the best mean score on five of the eight tasks, with strong performance on the CoLA and sentence pair inference tasks. When extending the context from 512 to 4,096 tokens, MaBERT reduces training time and inference latency by 2.36x and 2.43x, respectively, relative to the average of encoder baselines, demonstrating a practical long context efficient encoder.
MARC: Multimodal and Multi-Task Agentic Retrieval-Augmented Generation for Cold-Start Recommender System
Nov 15, 2025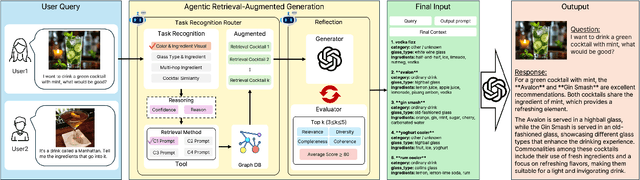
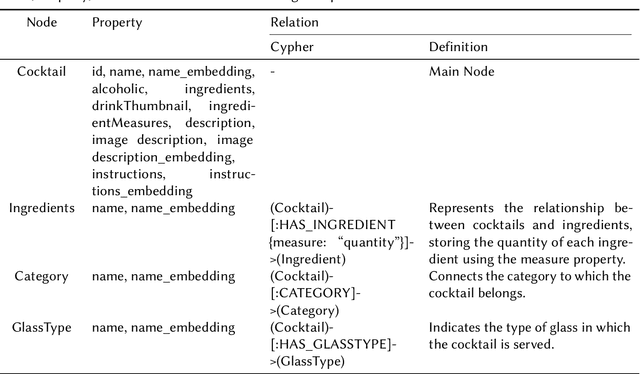
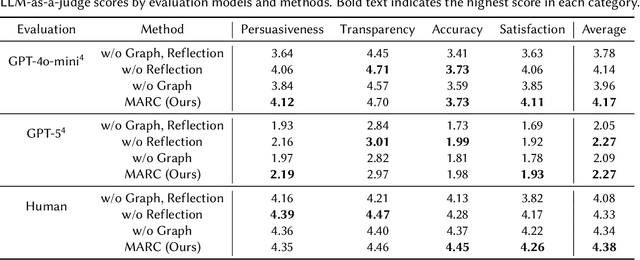
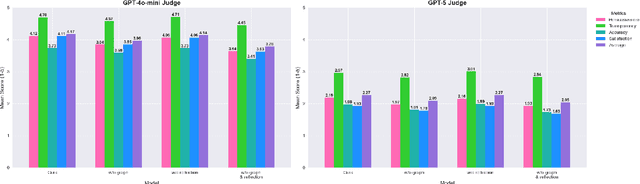
Recommender systems (RS) are currently being studied to mitigate limitations during cold-start conditions by leveraging modality information or introducing Agent concepts based on the exceptional reasoning capabilities of Large Language Models (LLMs). Meanwhile, food and beverage recommender systems have traditionally used knowledge graph and ontology concepts due to the domain's unique data attributes and relationship characteristics. On this background, we propose MARC, a multimodal and multi-task cocktail recommender system based on Agentic Retrieval-Augmented Generation (RAG) utilizing graph database under cold-start conditions. The proposed system generates high-quality, contextually appropriate answers through two core processes: a task recognition router and a reflection process. The graph database was constructed by processing cocktail data from Kaggle, and its effectiveness was evaluated using 200 manually crafted questions. The evaluation used both LLM-as-a-judge and human evaluation to demonstrate that answers generated via the graph database outperformed those from a simple vector database in terms of quality. The code is available at https://github.com/diddbwls/cocktail_rec_agentrag
GroupSHAP-Guided Integration of Financial News Keywords and Technical Indicators for Stock Price Prediction
Oct 27, 2025Recent advances in finance-specific language models such as FinBERT have enabled the quantification of public sentiment into index-based measures, yet compressing diverse linguistic signals into single metrics overlooks contextual nuances and limits interpretability. To address this limitation, explainable AI techniques, particularly SHAP (SHapley Additive Explanations), have been employed to identify influential features. However, SHAP's computational cost grows exponentially with input features, making it impractical for large-scale text-based financial data. This study introduces a GRU-based forecasting framework enhanced with GroupSHAP, which quantifies contributions of semantically related keyword groups rather than individual tokens, substantially reducing computational burden while preserving interpretability. We employed FinBERT to embed news articles from 2015 to 2024, clustered them into coherent semantic groups, and applied GroupSHAP to measure each group's contribution to stock price movements. The resulting group-level SHAP variables across multiple topics were used as input features for the prediction model. Empirical results from one-day-ahead forecasting of the S&P 500 index throughout 2024 demonstrate that our approach achieves a 32.2% reduction in MAE and a 40.5% reduction in RMSE compared with benchmark models without the GroupSHAP mechanism. This research presents the first application of GroupSHAP in news-driven financial forecasting, showing that grouped sentiment representations simultaneously enhance interpretability and predictive performance.
* 6 pages
Escaping Local Minima: Hybrid Artificial Potential Field with Wall-Follower for Decentralized Multi-Robot Navigation
Sep 16, 2024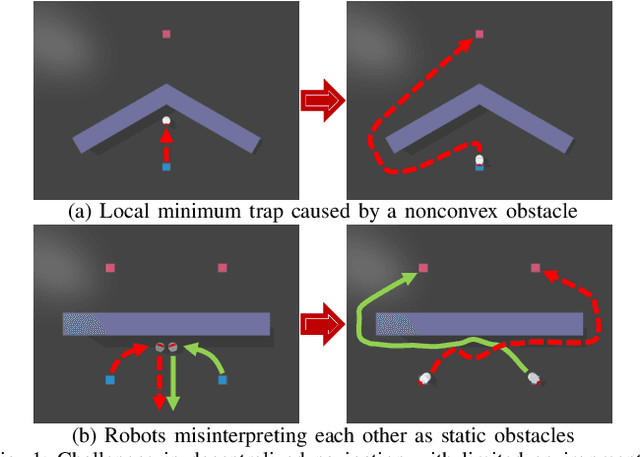
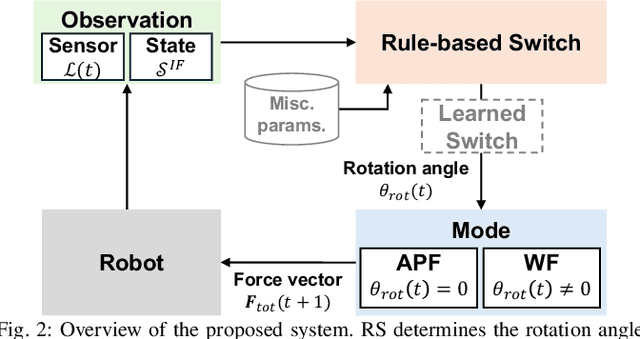
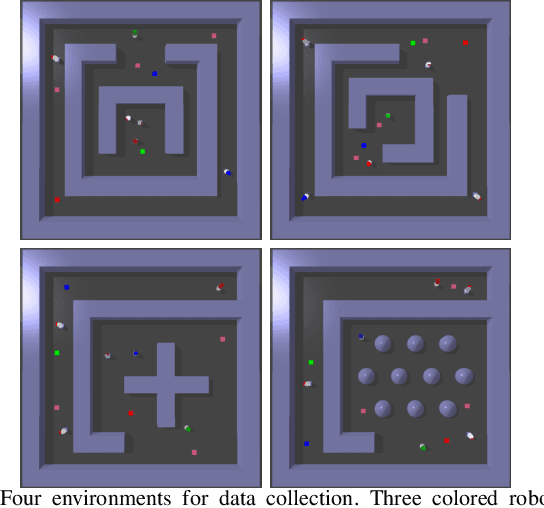
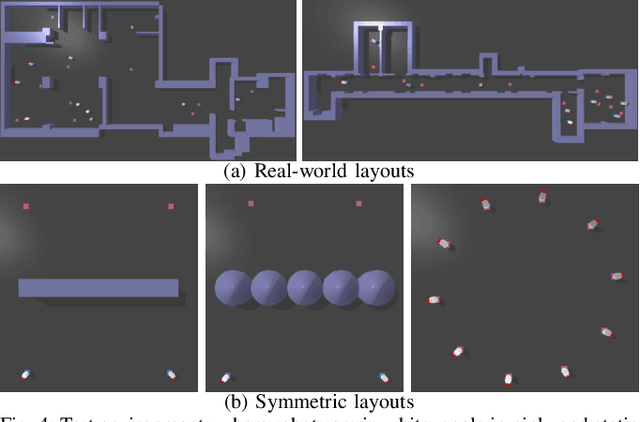
We tackle the challenges of decentralized multi-robot navigation in environments with nonconvex obstacles, where complete environmental knowledge is unavailable. While reactive methods like Artificial Potential Field (APF) offer simplicity and efficiency, they suffer from local minima, causing robots to become trapped due to their lack of global environmental awareness. Other existing solutions either rely on inter-robot communication, are limited to single-robot scenarios, or struggle to overcome nonconvex obstacles effectively. Our proposed methods enable collision-free navigation using only local sensor and state information without a map. By incorporating a wall-following (WF) behavior into the APF approach, our method allows robots to escape local minima, even in the presence of nonconvex and dynamic obstacles including other robots. We introduce two algorithms for switching between APF and WF: a rule-based system and an encoder network trained on expert demonstrations. Experimental results show that our approach achieves substantially higher success rates compared to state-of-the-art methods, highlighting its ability to overcome the limitations of local minima in complex environments
HyperCLOVA X Technical Report
Apr 13, 2024We introduce HyperCLOVA X, a family of large language models (LLMs) tailored to the Korean language and culture, along with competitive capabilities in English, math, and coding. HyperCLOVA X was trained on a balanced mix of Korean, English, and code data, followed by instruction-tuning with high-quality human-annotated datasets while abiding by strict safety guidelines reflecting our commitment to responsible AI. The model is evaluated across various benchmarks, including comprehensive reasoning, knowledge, commonsense, factuality, coding, math, chatting, instruction-following, and harmlessness, in both Korean and English. HyperCLOVA X exhibits strong reasoning capabilities in Korean backed by a deep understanding of the language and cultural nuances. Further analysis of the inherent bilingual nature and its extension to multilingualism highlights the model's cross-lingual proficiency and strong generalization ability to untargeted languages, including machine translation between several language pairs and cross-lingual inference tasks. We believe that HyperCLOVA X can provide helpful guidance for regions or countries in developing their sovereign LLMs.