 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapability-Aware Heterogeneous Control Barrier Functions for Decentralized Multi-Robot Safe Navigation
Apr 14, 2026Safe navigation for multi-robot systems requires enforcing safety without sacrificing task efficiency under decentralized decision-making. Existing decentralized methods often assume robot homogeneity, making shared safety requirements non-uniformly interpreted across heterogeneous agents with structurally different dynamics, which could lead to avoidance obligations not physically realizable for some robots and thus cause safety violations or deadlock. In this paper, we propose Capability-Aware Heterogeneous Control Barrier Function (CA-HCBF), a decentralized framework for consistent safety enforcement and capability-aware coordination in heterogeneous robot teams. We derive a canonical second-order control-affine representation that unifies holonomic and nonholonomic robots under acceleration-level control via canonical transformation and backstepping, preserving forward invariance of the safe set while avoiding relative-degree mismatch across heterogeneous dynamics. We further introduce a support-function-based directional capability metric that quantifies each robot's ability to follow its motion intent, deriving a pairwise responsibility allocation that distributes the safety burden proportionally to each robot's motion capability. A feasibility-aware clipping mechanism further constrains the allocation to each agent's physically achievable range, mitigating infeasible constraint assignments common in dense decentralized CBF settings. Simulations with up to 30 heterogeneous robots and a physical multi-robot demonstration show improved safety and task efficiency over baselines, validating real-world applicability across robots with distinct kinematic constraints.
Gaussian Mixture-Based Inverse Perception Contract for Uncertainty-Aware Robot Navigation
Mar 04, 2026Reliable navigation in cluttered environments requires perception outputs that are not only accurate but also equipped with uncertainty sets suitable for safe control. An inverse perception contract (IPC) provides such a connection by mapping perceptual estimates to sets that contain the ground truth with high confidence. Existing IPC formulations, however, instantiate uncertainty as a single ellipsoidal set and rely on deterministic trust scores to guide robot motion. Such a representation cannot capture the multi-modal and irregular structure of fine-grained perception errors, often resulting in over-conservative sets and degraded navigation performance. In this work, we introduce Gaussian Mixture-based Inverse Perception Contract (GM-IPC), which extends IPC to represent uncertainty with unions of ellipsoidal confidence sets derived from Gaussian mixture models. This design moves beyond deterministic single-set abstractions, enabling fine-grained, multi-modal, and non-convex error structures to be captured with formal guarantees. A learning framework is presented that trains GM-IPC to account for probabilistic inclusion, distribution matching, and empty-space penalties, ensuring both validity and compactness of the predicted sets. We further show that the resulting uncertainty characterizations can be leveraged in downstream planning frameworks for real-time safe navigation, enabling less conservative and more adaptive robot motion while preserving safety in a probabilistic manner.
Modular Safety Guardrails Are Necessary for Foundation-Model-Enabled Robots in the Real World
Feb 03, 2026The integration of foundation models (FMs) into robotics has accelerated real-world deployment, while introducing new safety challenges arising from open-ended semantic reasoning and embodied physical action. These challenges require safety notions beyond physical constraint satisfaction. In this paper, we characterize FM-enabled robot safety along three dimensions: action safety (physical feasibility and constraint compliance), decision safety (semantic and contextual appropriateness), and human-centered safety (conformance to human intent, norms, and expectations). We argue that existing approaches, including static verification, monolithic controllers, and end-to-end learned policies, are insufficient in settings where tasks, environments, and human expectations are open-ended, long-tailed, and subject to adaptation over time. To address this gap, we propose modular safety guardrails, consisting of monitoring (evaluation) and intervention layers, as an architectural foundation for comprehensive safety across the autonomy stack. Beyond modularity, we highlight possible cross-layer co-design opportunities through representation alignment and conservatism allocation to enable faster, less conservative, and more effective safety enforcement. We call on the community to explore richer guardrail modules and principled co-design strategies to advance safe real-world physical AI deployment.
Enhancing Safety of Foundation Models for Visual Navigation through Collision Avoidance via Repulsive Estimation
Jun 04, 2025We propose CARE (Collision Avoidance via Repulsive Estimation), a plug-and-play module that enhances the safety of vision-based navigation without requiring additional range sensors or fine-tuning of pretrained models. While recent foundation models using only RGB inputs have shown strong performance, they often fail to generalize in out-of-distribution (OOD) environments with unseen objects or variations in camera parameters (e.g., field of view, pose, or focal length). Without fine-tuning, these models may generate unsafe trajectories that lead to collisions, requiring costly data collection and retraining. CARE addresses this limitation by seamlessly integrating with any RGB-based navigation system that outputs local trajectories, dynamically adjusting them using repulsive force vectors derived from monocular depth maps. We evaluate CARE by combining it with state-of-the-art vision-based navigation models across multiple robot platforms. CARE consistently reduces collision rates (up to 100%) without sacrificing goal-reaching performance and improves collision-free travel distance by up to 10.7x in exploration tasks.
Merry-Go-Round: Safe Control of Decentralized Multi-Robot Systems with Deadlock Prevention
Mar 07, 2025We propose a hybrid approach for decentralized multi-robot navigation that ensures both safety and deadlock prevention. Building on a standard control formulation, we add a lightweight deadlock prevention mechanism by forming temporary "roundabouts" (circular reference paths). Each robot relies only on local, peer-to-peer communication and a controller for base collision avoidance; a roundabout is generated or joined on demand to avert deadlocks. Robots in the roundabout travel in one direction until an escape condition is met, allowing them to return to goal-oriented motion. Unlike classical decentralized methods that lack explicit deadlock resolution, our roundabout maneuver ensures system-wide forward progress while preserving safety constraints. Extensive simulations and physical robot experiments show that our method consistently outperforms or matches the success and arrival rates of other decentralized control approaches, particularly in cluttered or high-density scenarios, all with minimal centralized coordination.
Escaping Local Minima: Hybrid Artificial Potential Field with Wall-Follower for Decentralized Multi-Robot Navigation
Sep 16, 2024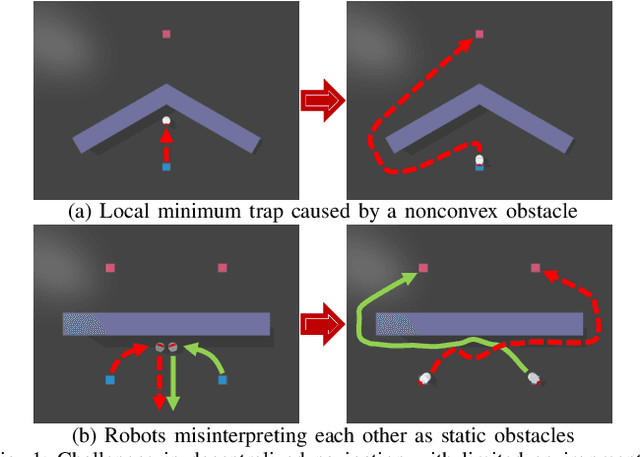
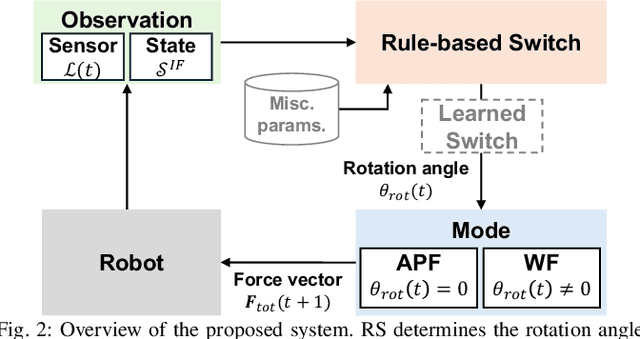
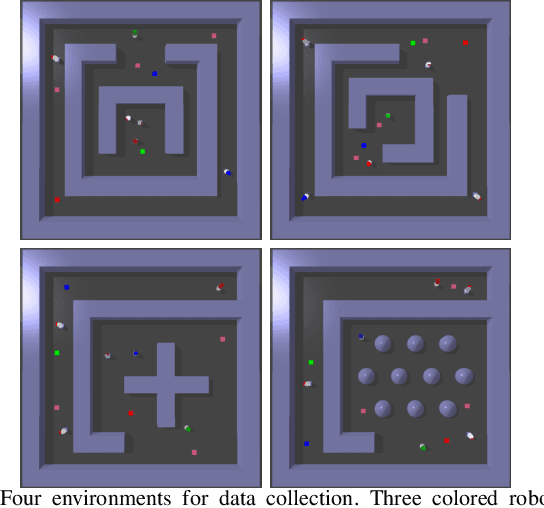
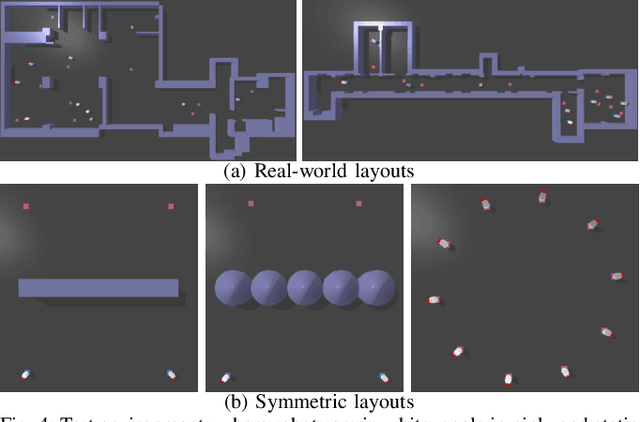
We tackle the challenges of decentralized multi-robot navigation in environments with nonconvex obstacles, where complete environmental knowledge is unavailable. While reactive methods like Artificial Potential Field (APF) offer simplicity and efficiency, they suffer from local minima, causing robots to become trapped due to their lack of global environmental awareness. Other existing solutions either rely on inter-robot communication, are limited to single-robot scenarios, or struggle to overcome nonconvex obstacles effectively. Our proposed methods enable collision-free navigation using only local sensor and state information without a map. By incorporating a wall-following (WF) behavior into the APF approach, our method allows robots to escape local minima, even in the presence of nonconvex and dynamic obstacles including other robots. We introduce two algorithms for switching between APF and WF: a rule-based system and an encoder network trained on expert demonstrations. Experimental results show that our approach achieves substantially higher success rates compared to state-of-the-art methods, highlighting its ability to overcome the limitations of local minima in complex environments
Safe Interval RRT* for Scalable Multi-Robot Path Planning in Continuous Space
Apr 02, 2024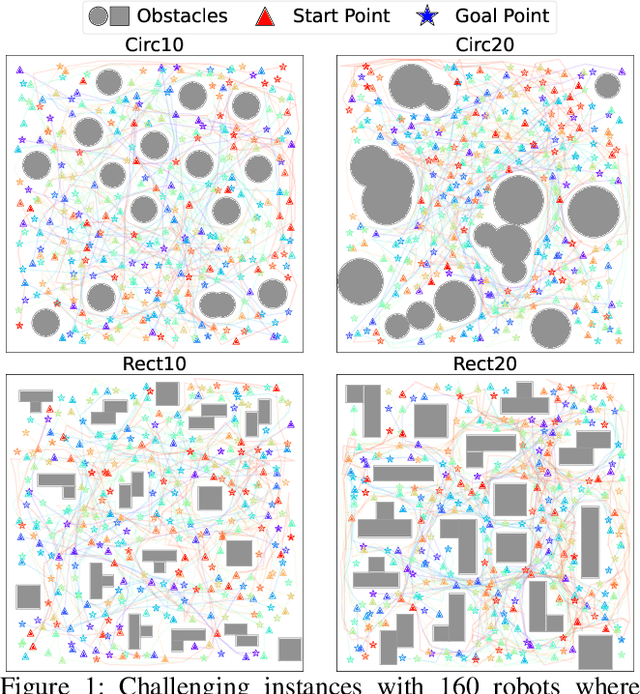
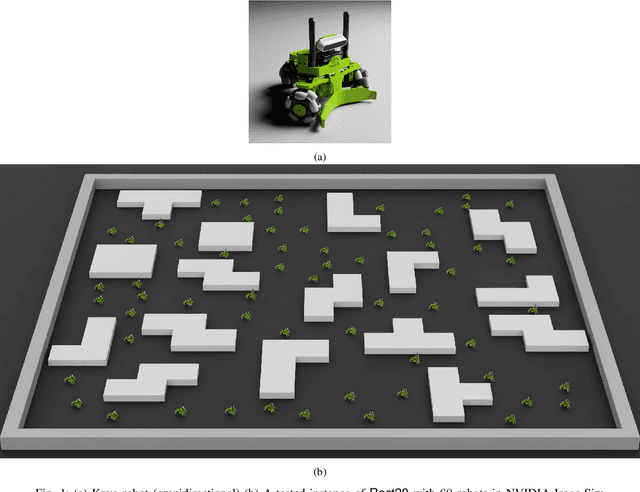
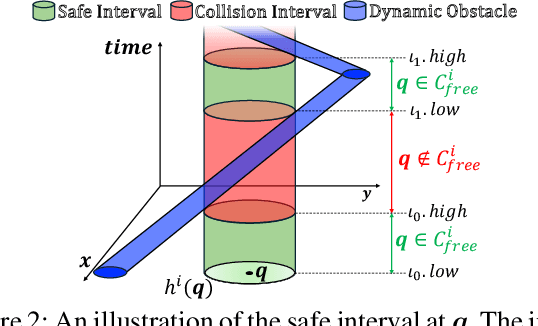
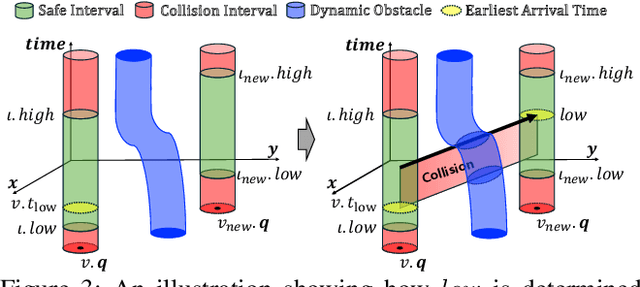
In this paper, we consider the problem of Multi-Robot Path Planning (MRPP) in continuous space to find conflict-free paths. The difficulty of the problem arises from two primary factors. First, the involvement of multiple robots leads to combinatorial decision-making, which escalates the search space exponentially. Second, the continuous space presents potentially infinite states and actions. For this problem, we propose a two-level approach where the low level is a sampling-based planner Safe Interval RRT* (SI-RRT*) that finds a collision-free trajectory for individual robots. The high level can use any method that can resolve inter-robot conflicts where we employ two representative methods that are Prioritized Planning (SI-CPP) and Conflict Based Search (SI-CCBS). Experimental results show that SI-RRT* can find a high-quality solution quickly with a small number of samples. SI-CPP exhibits improved scalability while SI-CCBS produces higher-quality solutions compared to the state-of-the-art planners for continuous space. Compared to the most scalable existing algorithm, SI-CPP achieves a success rate that is up to 94% higher with 100 robots while maintaining solution quality (i.e., flowtime, the sum of travel times of all robots) without significant compromise. SI-CPP also decreases the makespan up to 45%. SI-CCBS decreases the flowtime by 9% compared to the competitor, albeit exhibiting a 14% lower success rate.