 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFractional Programming for Kullback-Leibler Divergence in Hypothesis Testing
Jan 02, 2026Maximizing the Kullback-Leibler divergence (KLD) is a fundamental problem in waveform design for active sensing and hypothesis testing, as it directly relates to the error exponent of detection probability. However, the associated optimization problem is highly nonconvex due to the intricate coupling of log-determinant and matrix trace terms. Existing solutions often suffer from high computational complexity, typically requiring matrix inversion at every iteration. In this paper, we propose a computationally efficient optimization framework based on fractional programming (FP). Our key idea is to reformulate the KLD maximization problem into a sequence of tractable quadratic subproblems using matrix FP. To further reduce complexity, we introduce a nonhomogeneous relaxation technique that replaces the costly linear system solver with a simple closed-form update, thereby reducing the per-iteration complexity to quadratic order. To compensate for the convergence speed trade-off caused by relaxation, we employ an acceleration method called STEM by interpreting the iterative scheme as a fixed-point mapping. The resulting algorithm achieves significantly faster convergence rates with low per-iteration cost. Numerical results demonstrate that our approach reduces the total runtime by orders of magnitude compared to a state-of-the-art benchmark. Finally, we apply the proposed framework to a multiple random access scenario and a joint integrated sensing and communication scenario, validating the efficacy of our framework in such applications.
Stop-N-Go: Search-based Conflict Resolution for Motion Planning of Multiple Robotic Manipulators
Oct 10, 2024We address the motion planning problem for multiple robotic manipulators in packed environments where shared workspace can result in goal positions occupied or blocked by other robots unless those other robots move away to make the goal positions free. While planning in a coupled configuration space (C-space) is straightforward, it struggles to scale with the number of robots and often fails to find solutions. Decoupled planning is faster but frequently leads to conflicts between trajectories. We propose a conflict resolution approach that inserts pauses into individually planned trajectories using an A* search strategy to minimize the makespan--the total time until all robots complete their tasks. This method allows some robots to stop, enabling others to move without collisions, and maintains short distances in the C-space. It also effectively handles cases where goal positions are initially blocked by other robots. Experimental results show that our method successfully solves challenging instances where baseline methods fail to find feasible solutions.
Morality is Non-Binary: Building a Pluralist Moral Sentence Embedding Space using Contrastive Learning
Jan 30, 2024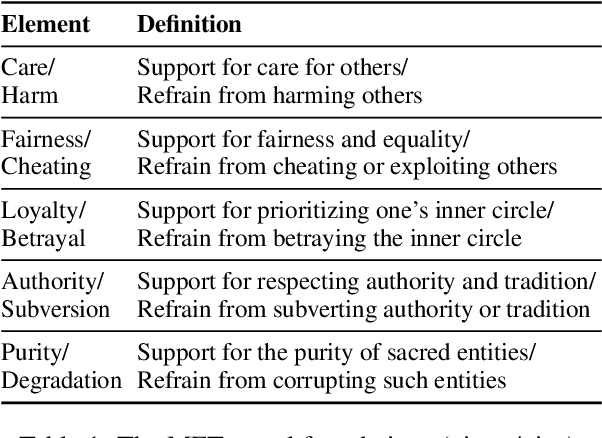
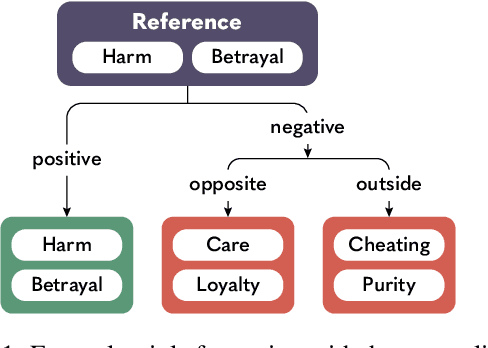

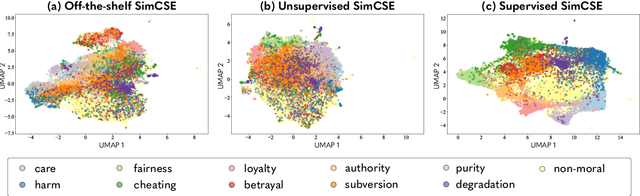
Recent advances in NLP show that language models retain a discernible level of knowledge in deontological ethics and moral norms. However, existing works often treat morality as binary, ranging from right to wrong. This simplistic view does not capture the nuances of moral judgment. Pluralist moral philosophers argue that human morality can be deconstructed into a finite number of elements, respecting individual differences in moral judgment. In line with this view, we build a pluralist moral sentence embedding space via a state-of-the-art contrastive learning approach. We systematically investigate the embedding space by studying the emergence of relationships among moral elements, both quantitatively and qualitatively. Our results show that a pluralist approach to morality can be captured in an embedding space. However, moral pluralism is challenging to deduce via self-supervision alone and requires a supervised approach with human labels.
BIRP: Bitcoin Information Retrieval Prediction Model Based on Multimodal Pattern Matching
Aug 14, 2023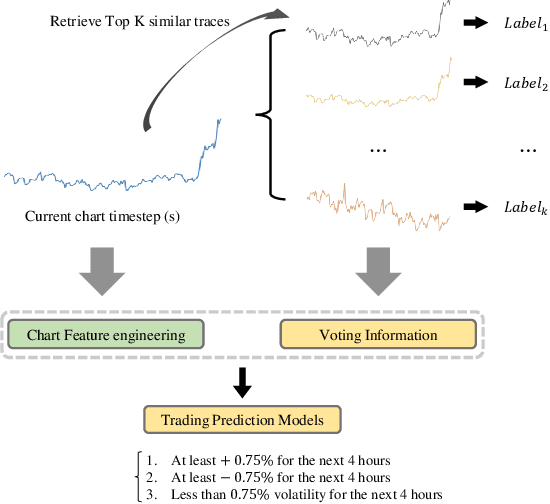
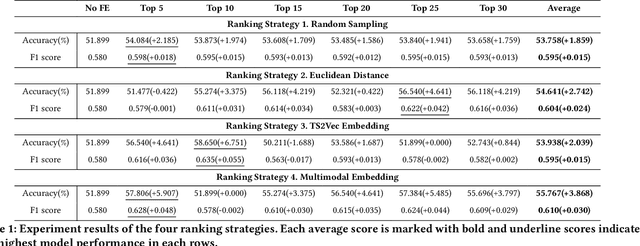
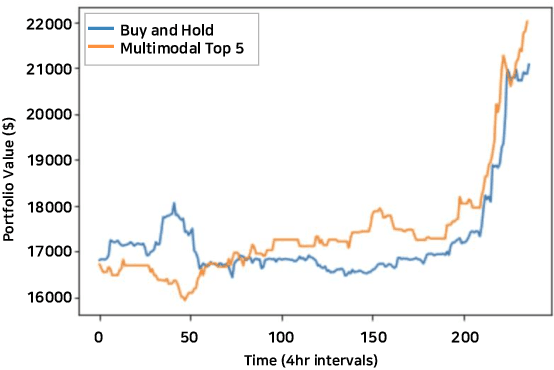
Financial time series have historically been assumed to be a martingale process under the Random Walk hypothesis. Instead of making investment decisions using the raw prices alone, various multimodal pattern matching algorithms have been developed to help detect subtly hidden repeatable patterns within the financial market. Many of the chart-based pattern matching tools only retrieve similar past chart (PC) patterns given the current chart (CC) pattern, and leaves the entire interpretive and predictive analysis, thus ultimately the final investment decision, to the investors. In this paper, we propose an approach of ranking similar PC movements given the CC information and show that exploiting this as additional features improves the directional prediction capacity of our model. We apply our ranking and directional prediction modeling methodologies on Bitcoin due to its highly volatile prices that make it challenging to predict its future movements.