 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGTR-Turbo: Merged Checkpoint is Secretly a Free Teacher for Agentic VLM Training
Dec 15, 2025Multi-turn reinforcement learning (RL) for multi-modal agents built upon vision-language models (VLMs) is hampered by sparse rewards and long-horizon credit assignment. Recent methods densify the reward by querying a teacher that provides step-level feedback, e.g., Guided Thought Reinforcement (GTR) and On-Policy Distillation, but rely on costly, often privileged models as the teacher, limiting practicality and reproducibility. We introduce GTR-Turbo, a highly efficient upgrade to GTR, which matches the performance without training or querying an expensive teacher model. Specifically, GTR-Turbo merges the weights of checkpoints produced during the ongoing RL training, and then uses this merged model as a "free" teacher to guide the subsequent RL via supervised fine-tuning or soft logit distillation. This design removes dependence on privileged VLMs (e.g., GPT or Gemini), mitigates the "entropy collapse" observed in prior work, and keeps training stable. Across diverse visual agentic tasks, GTR-Turbo improves the accuracy of the baseline model by 10-30% while reducing wall-clock training time by 50% and compute cost by 60% relative to GTR.
EndoSfM3D: Learning to 3D Reconstruct Any Endoscopic Surgery Scene using Self-supervised Foundation Model
Oct 25, 2025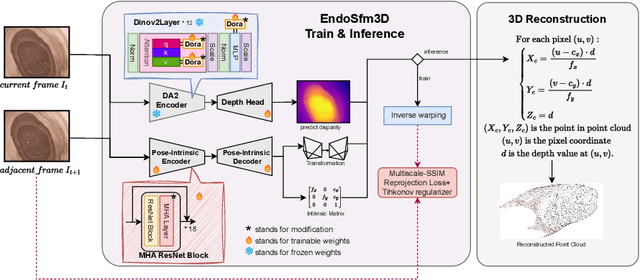
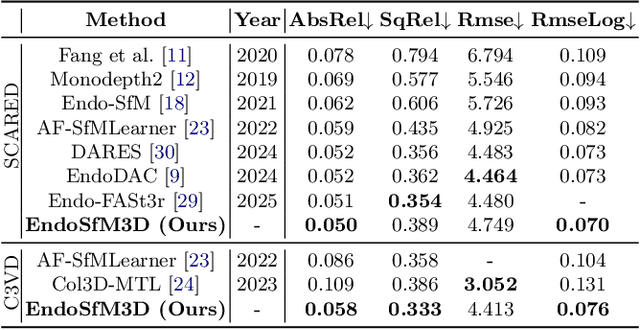
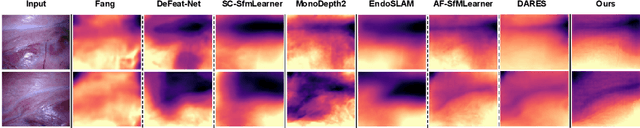

3D reconstruction of endoscopic surgery scenes plays a vital role in enhancing scene perception, enabling AR visualization, and supporting context-aware decision-making in image-guided surgery. A critical yet challenging step in this process is the accurate estimation of the endoscope's intrinsic parameters. In real surgical settings, intrinsic calibration is hindered by sterility constraints and the use of specialized endoscopes with continuous zoom and telescope rotation. Most existing methods for endoscopic 3D reconstruction do not estimate intrinsic parameters, limiting their effectiveness for accurate and reliable reconstruction. In this paper, we integrate intrinsic parameter estimation into a self-supervised monocular depth estimation framework by adapting the Depth Anything V2 (DA2) model for joint depth, pose, and intrinsics prediction. We introduce an attention-based pose network and a Weight-Decomposed Low-Rank Adaptation (DoRA) strategy for efficient fine-tuning of DA2. Our method is validated on the SCARED and C3VD public datasets, demonstrating superior performance compared to recent state-of-the-art approaches in self-supervised monocular depth estimation and 3D reconstruction. Code and model weights can be found in project repository: https://github.com/MOYF-beta/EndoSfM3D.
Hi-Agent: Hierarchical Vision-Language Agents for Mobile Device Control
Oct 16, 2025Building agents that autonomously operate mobile devices has attracted increasing attention. While Vision-Language Models (VLMs) show promise, most existing approaches rely on direct state-to-action mappings, which lack structured reasoning and planning, and thus generalize poorly to novel tasks or unseen UI layouts. We introduce Hi-Agent, a trainable hierarchical vision-language agent for mobile control, featuring a high-level reasoning model and a low-level action model that are jointly optimized. For efficient training, we reformulate multi-step decision-making as a sequence of single-step subgoals and propose a foresight advantage function, which leverages execution feedback from the low-level model to guide high-level optimization. This design alleviates the path explosion issue encountered by Group Relative Policy Optimization (GRPO) in long-horizon tasks and enables stable, critic-free joint training. Hi-Agent achieves a new State-Of-The-Art (SOTA) 87.9% task success rate on the Android-in-the-Wild (AitW) benchmark, significantly outperforming prior methods across three paradigms: prompt-based (AppAgent: 17.7%), supervised (Filtered BC: 54.5%), and reinforcement learning-based (DigiRL: 71.9%). It also demonstrates competitive zero-shot generalization on the ScreenSpot-v2 benchmark. On the more challenging AndroidWorld benchmark, Hi-Agent also scales effectively with larger backbones, showing strong adaptability in high-complexity mobile control scenarios.
xMTF: A Formula-Free Model for Reinforcement-Learning-Based Multi-Task Fusion in Recommender Systems
Apr 08, 2025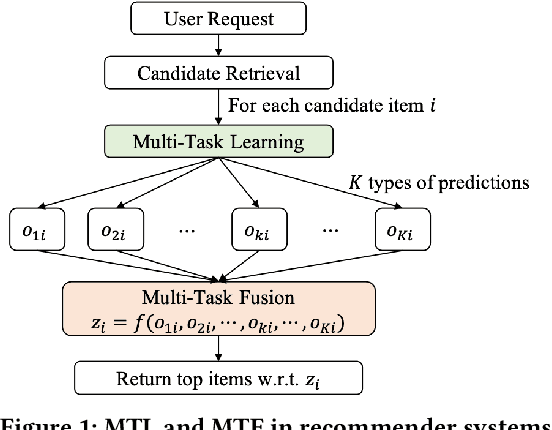
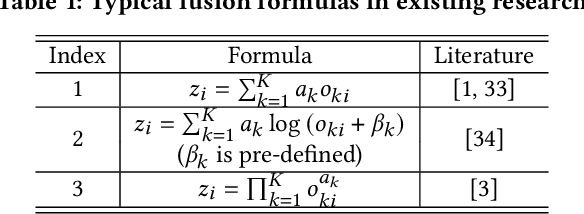
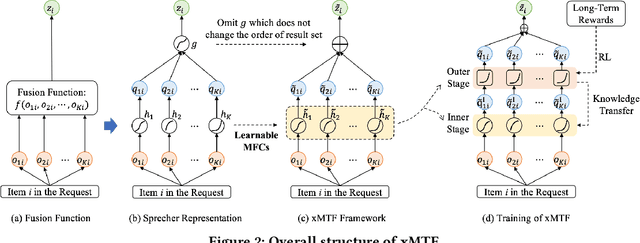
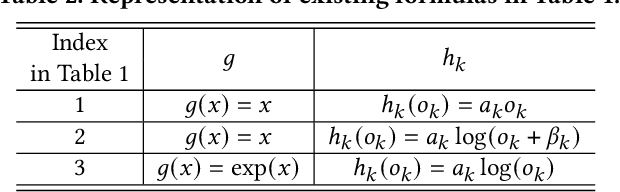
Recommender systems need to optimize various types of user feedback, e.g., clicks, likes, and shares. A typical recommender system handling multiple types of feedback has two components: a multi-task learning (MTL) module, predicting feedback such as click-through rate and like rate; and a multi-task fusion (MTF) module, integrating these predictions into a single score for item ranking. MTF is essential for ensuring user satisfaction, as it directly influences recommendation outcomes. Recently, reinforcement learning (RL) has been applied to MTF tasks to improve long-term user satisfaction. However, existing RL-based MTF methods are formula-based methods, which only adjust limited coefficients within pre-defined formulas. The pre-defined formulas restrict the RL search space and become a bottleneck for MTF. To overcome this, we propose a formula-free MTF framework. We demonstrate that any suitable fusion function can be expressed as a composition of single-variable monotonic functions, as per the Sprecher Representation Theorem. Leveraging this, we introduce a novel learnable monotonic fusion cell (MFC) to replace pre-defined formulas. We call this new MFC-based model eXtreme MTF (xMTF). Furthermore, we employ a two-stage hybrid (TSH) learning strategy to train xMTF effectively. By expanding the MTF search space, xMTF outperforms existing methods in extensive offline and online experiments.
GenCRF: Generative Clustering and Reformulation Framework for Enhanced Intent-Driven Information Retrieval
Sep 17, 2024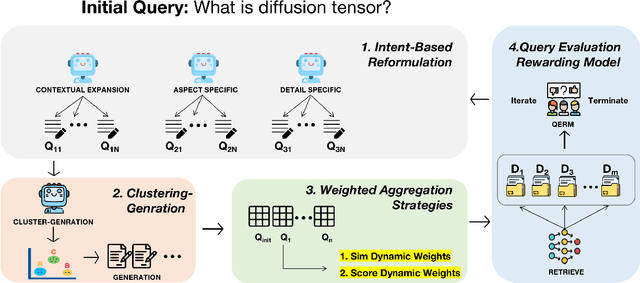
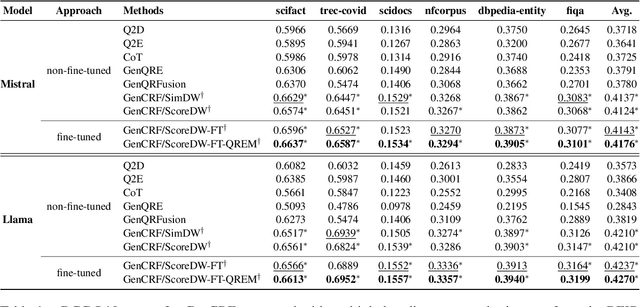
Query reformulation is a well-known problem in Information Retrieval (IR) aimed at enhancing single search successful completion rate by automatically modifying user's input query. Recent methods leverage Large Language Models (LLMs) to improve query reformulation, but often generate limited and redundant expansions, potentially constraining their effectiveness in capturing diverse intents. In this paper, we propose GenCRF: a Generative Clustering and Reformulation Framework to capture diverse intentions adaptively based on multiple differentiated, well-generated queries in the retrieval phase for the first time. GenCRF leverages LLMs to generate variable queries from the initial query using customized prompts, then clusters them into groups to distinctly represent diverse intents. Furthermore, the framework explores to combine diverse intents query with innovative weighted aggregation strategies to optimize retrieval performance and crucially integrates a novel Query Evaluation Rewarding Model (QERM) to refine the process through feedback loops. Empirical experiments on the BEIR benchmark demonstrate that GenCRF achieves state-of-the-art performance, surpassing previous query reformulation SOTAs by up to 12% on nDCG@10. These techniques can be adapted to various LLMs, significantly boosting retriever performance and advancing the field of Information Retrieval.
Iterative Matching Point
Oct 23, 2019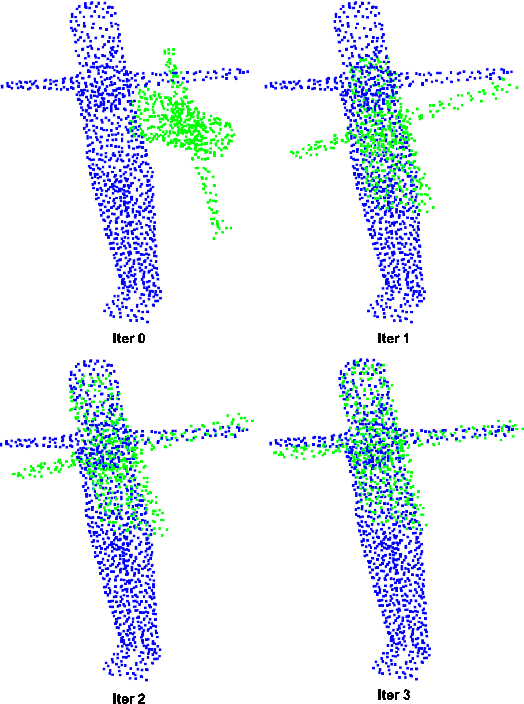
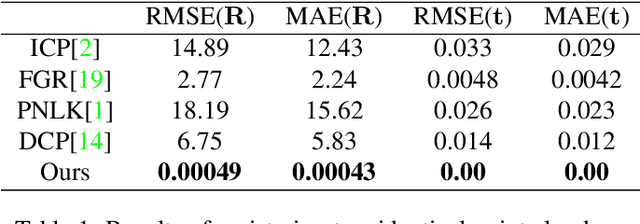

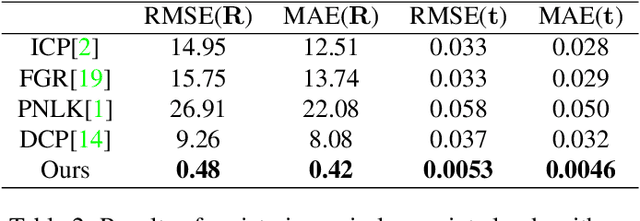
In this paper, we propose a neural network-based point cloud registration method named Iterative Matching Point (IMP). Our model iteratively matches features of points from two point clouds and solve the rigid body motion by minimizing the distance between the matching points. The idea is similar to Iterative Closest Point (ICP), but our model determines correspondences by comparing geometric features instead of just finding the closest point. Thus it does not suffer from the local minima problem and can handle point clouds with large rotation angles. Furthermore, the robustness of the feature extraction network allows IMP to register partial and noisy point clouds. Experiments on the ModelNet40 dataset show that our method outperforms existing point cloud registration method by a large margin, especially when the initial rotation angle is large. Also, its capability generalizes to real world 2.5D data without training on them.