 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Global Benchmark of Algorithms for Segmenting Late Gadolinium-Enhanced Cardiac Magnetic Resonance Imaging
May 07, 2020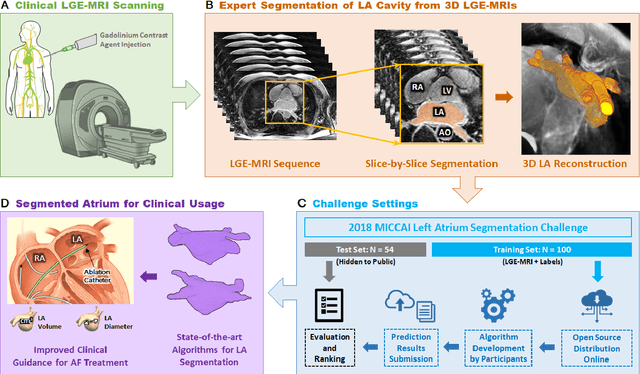
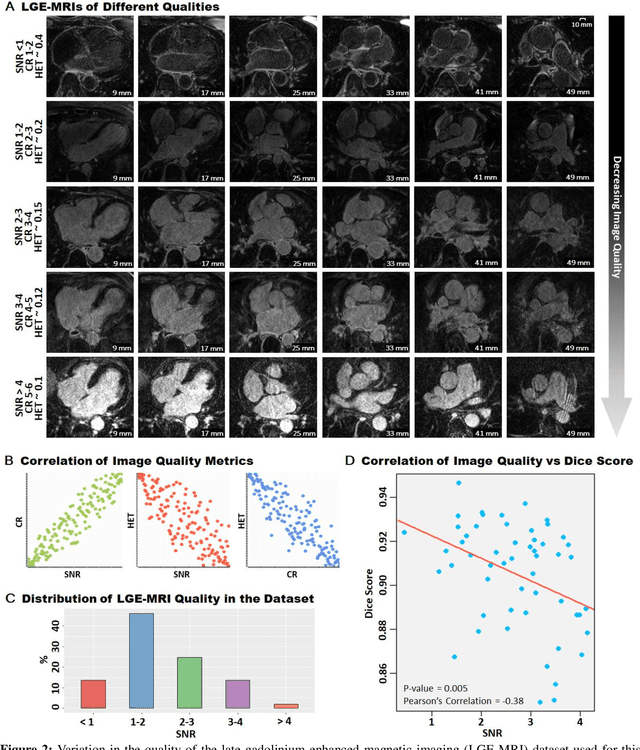
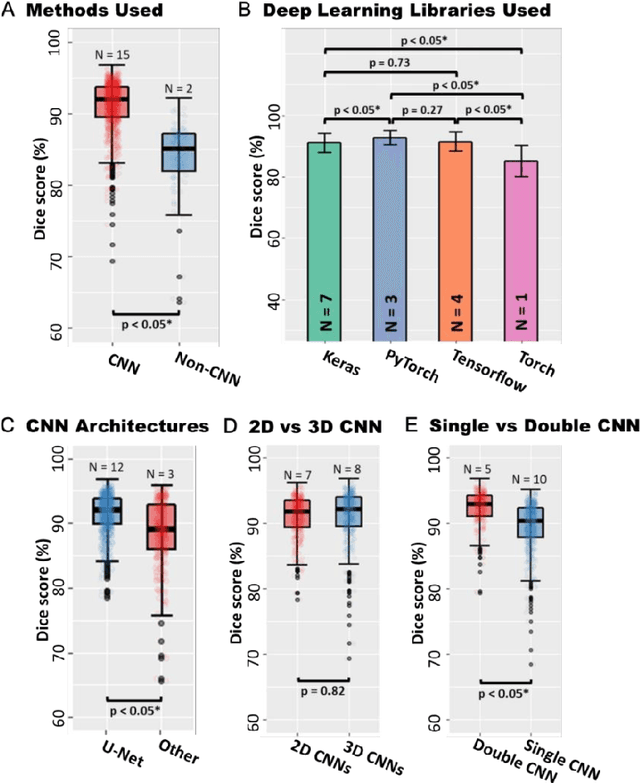
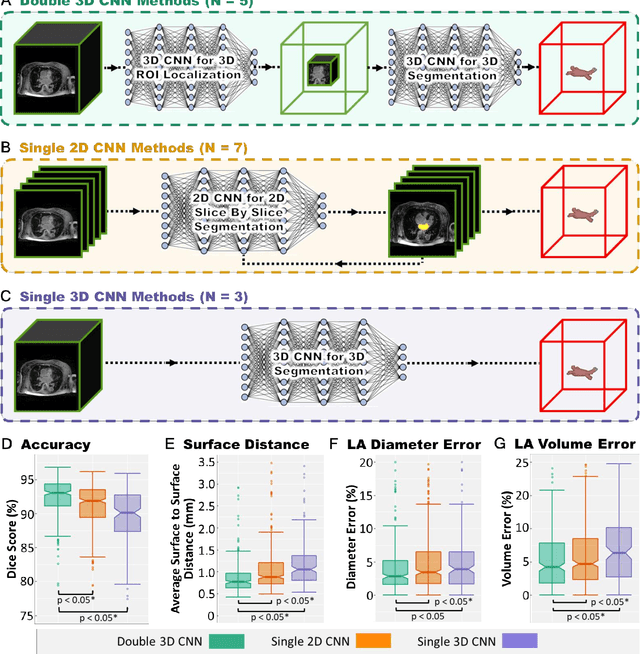
Segmentation of cardiac images, particularly late gadolinium-enhanced magnetic resonance imaging (LGE-MRI) widely used for visualizing diseased cardiac structures, is a crucial first step for clinical diagnosis and treatment. However, direct segmentation of LGE-MRIs is challenging due to its attenuated contrast. Since most clinical studies have relied on manual and labor-intensive approaches, automatic methods are of high interest, particularly optimized machine learning approaches. To address this, we organized the "2018 Left Atrium Segmentation Challenge" using 154 3D LGE-MRIs, currently the world's largest cardiac LGE-MRI dataset, and associated labels of the left atrium segmented by three medical experts, ultimately attracting the participation of 27 international teams. In this paper, extensive analysis of the submitted algorithms using technical and biological metrics was performed by undergoing subgroup analysis and conducting hyper-parameter analysis, offering an overall picture of the major design choices of convolutional neural networks (CNNs) and practical considerations for achieving state-of-the-art left atrium segmentation. Results show the top method achieved a dice score of 93.2% and a mean surface to a surface distance of 0.7 mm, significantly outperforming prior state-of-the-art. Particularly, our analysis demonstrated that double, sequentially used CNNs, in which a first CNN is used for automatic region-of-interest localization and a subsequent CNN is used for refined regional segmentation, achieved far superior results than traditional methods and pipelines containing single CNNs. This large-scale benchmarking study makes a significant step towards much-improved segmentation methods for cardiac LGE-MRIs, and will serve as an important benchmark for evaluating and comparing the future works in the field.
Towards Augmented Reality-based Suturing in Monocular Laparoscopic Training
Jan 19, 2020
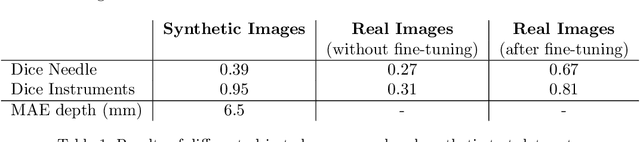
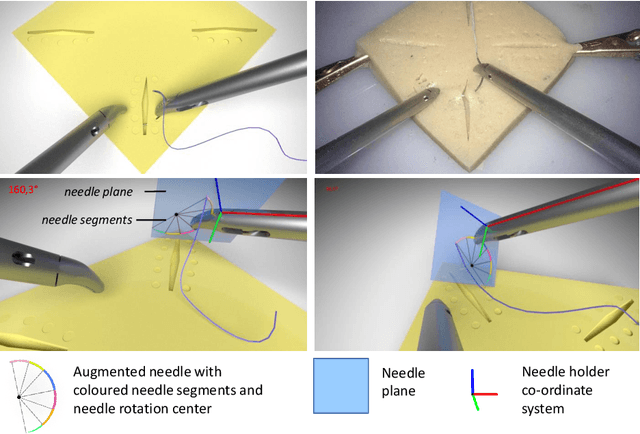

Minimally Invasive Surgery (MIS) techniques have gained rapid popularity among surgeons since they offer significant clinical benefits including reduced recovery time and diminished post-operative adverse effects. However, conventional endoscopic systems output monocular video which compromises depth perception, spatial orientation and field of view. Suturing is one of the most complex tasks performed under these circumstances. Key components of this tasks are the interplay between needle holder and the surgical needle. Reliable 3D localization of needle and instruments in real time could be used to augment the scene with additional parameters that describe their quantitative geometric relation, e.g. the relation between the estimated needle plane and its rotation center and the instrument. This could contribute towards standardization and training of basic skills and operative techniques, enhance overall surgical performance, and reduce the risk of complications. The paper proposes an Augmented Reality environment with quantitative and qualitative visual representations to enhance laparoscopic training outcomes performed on a silicone pad. This is enabled by a multi-task supervised deep neural network which performs multi-class segmentation and depth map prediction. Scarcity of labels has been conquered by creating a virtual environment which resembles the surgical training scenario to generate dense depth maps and segmentation maps. The proposed convolutional neural network was tested on real surgical training scenarios and showed to be robust to occlusion of the needle. The network achieves a dice score of 0.67 for surgical needle segmentation, 0.81 for needle holder instrument segmentation and a mean absolute error of 6.5 mm for depth estimation.