 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Augmented Reality-based Suturing in Monocular Laparoscopic Training
Paper and Code
Jan 19, 2020
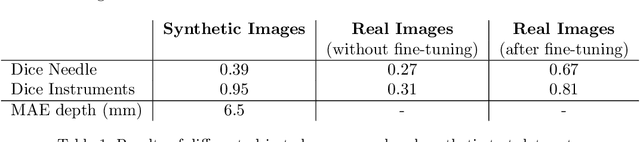
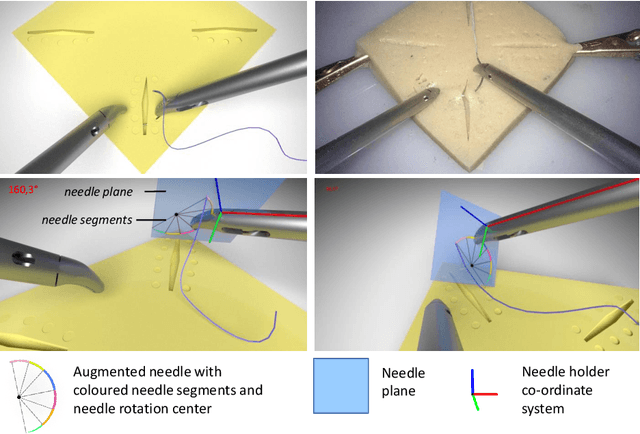

Minimally Invasive Surgery (MIS) techniques have gained rapid popularity among surgeons since they offer significant clinical benefits including reduced recovery time and diminished post-operative adverse effects. However, conventional endoscopic systems output monocular video which compromises depth perception, spatial orientation and field of view. Suturing is one of the most complex tasks performed under these circumstances. Key components of this tasks are the interplay between needle holder and the surgical needle. Reliable 3D localization of needle and instruments in real time could be used to augment the scene with additional parameters that describe their quantitative geometric relation, e.g. the relation between the estimated needle plane and its rotation center and the instrument. This could contribute towards standardization and training of basic skills and operative techniques, enhance overall surgical performance, and reduce the risk of complications. The paper proposes an Augmented Reality environment with quantitative and qualitative visual representations to enhance laparoscopic training outcomes performed on a silicone pad. This is enabled by a multi-task supervised deep neural network which performs multi-class segmentation and depth map prediction. Scarcity of labels has been conquered by creating a virtual environment which resembles the surgical training scenario to generate dense depth maps and segmentation maps. The proposed convolutional neural network was tested on real surgical training scenarios and showed to be robust to occlusion of the needle. The network achieves a dice score of 0.67 for surgical needle segmentation, 0.81 for needle holder instrument segmentation and a mean absolute error of 6.5 mm for depth estimation.