 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic-assisted Ultrasound for Fetal Imaging: Evolution from Single-arm to Dual-arm System
Apr 10, 2019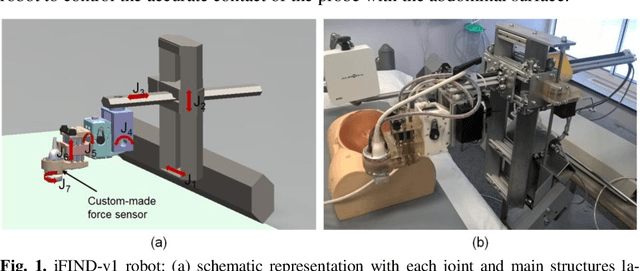
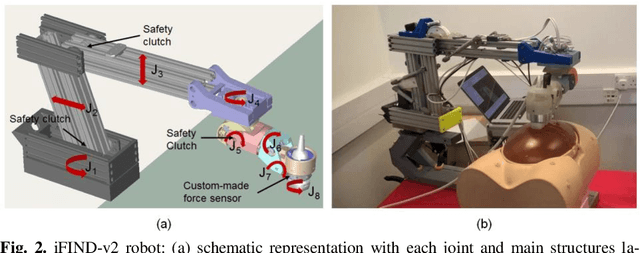
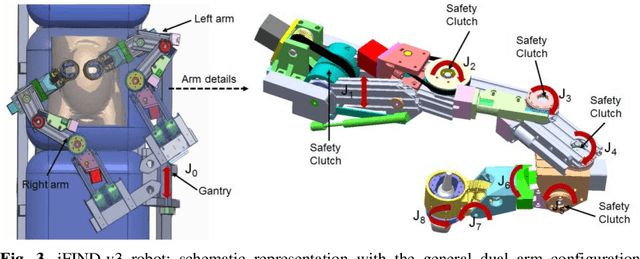
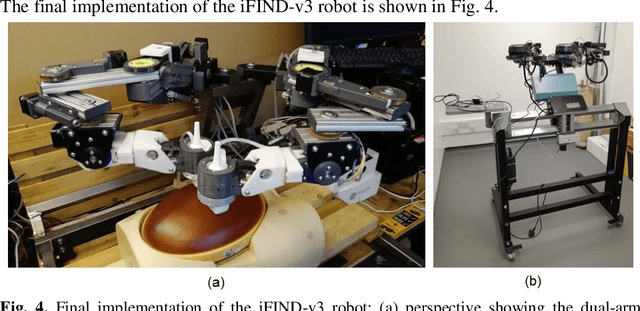
The development of robotic-assisted extracorporeal ultrasound systems has a long history and a number of projects have been proposed since the 1990s focusing on different technical aspects. These aim to resolve the deficiencies of on-site manual manipulation of hand-held ultrasound probes. This paper presents the recent ongoing developments of a series of bespoke robotic systems, including both single-arm and dual-arm versions, for a project known as intelligent Fetal Imaging and Diagnosis (iFIND). After a brief review of the development history of the extracorporeal ultrasound robotic system used for fetal and abdominal examinations, the specific aim of the iFIND robots, the design evolution, the implementation details of each version, and the initial clinical feedback of the iFIND robot series are presented. Based on the preliminary testing of these newly-proposed robots on 42 volunteers, the successful and re-liable working of the mechatronic systems were validated. Analysis of a participant questionnaire indicates a comfortable scanning experience for the volunteers and a good acceptance rate to being scanned by the robots.
Standard Plane Detection in 3D Fetal Ultrasound Using an Iterative Transformation Network
Oct 07, 2018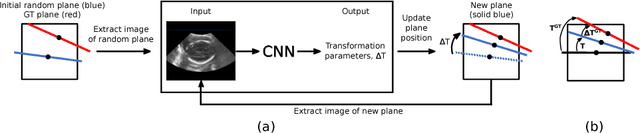
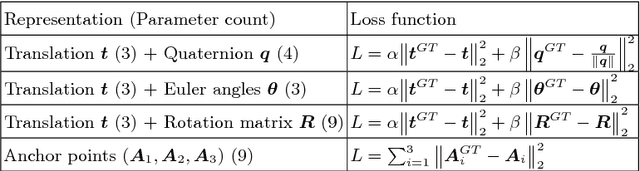
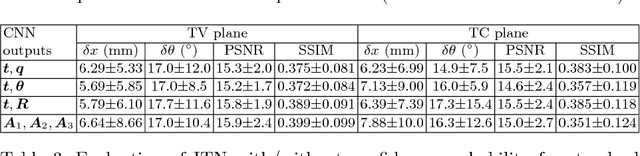
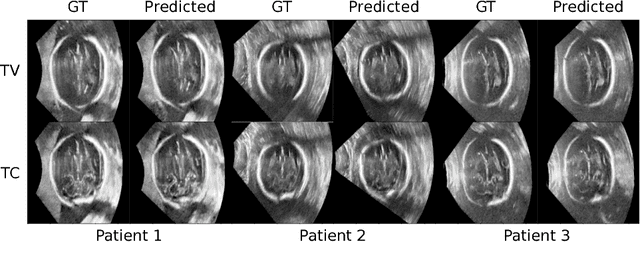
Standard scan plane detection in fetal brain ultrasound (US) forms a crucial step in the assessment of fetal development. In clinical settings, this is done by manually manoeuvring a 2D probe to the desired scan plane. With the advent of 3D US, the entire fetal brain volume containing these standard planes can be easily acquired. However, manual standard plane identification in 3D volume is labour-intensive and requires expert knowledge of fetal anatomy. We propose a new Iterative Transformation Network (ITN) for the automatic detection of standard planes in 3D volumes. ITN uses a convolutional neural network to learn the relationship between a 2D plane image and the transformation parameters required to move that plane towards the location/orientation of the standard plane in the 3D volume. During inference, the current plane image is passed iteratively to the network until it converges to the standard plane location. We explore the effect of using different transformation representations as regression outputs of ITN. Under a multi-task learning framework, we introduce additional classification probability outputs to the network to act as confidence measures for the regressed transformation parameters in order to further improve the localisation accuracy. When evaluated on 72 US volumes of fetal brain, our method achieves an error of 3.83mm/12.7 degrees and 3.80mm/12.6 degrees for the transventricular and transcerebellar planes respectively and takes 0.46s per plane. Source code is publicly available at https://github.com/yuanwei1989/plane-detection.
* 8 pages, 2 figures, accepted for MICCAI 2018; Added link to source code
Fast Multiple Landmark Localisation Using a Patch-based Iterative Network
Oct 07, 2018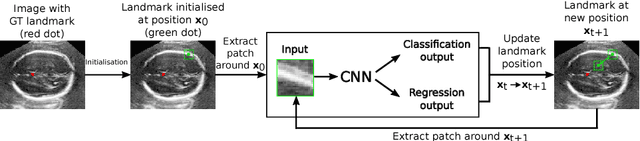
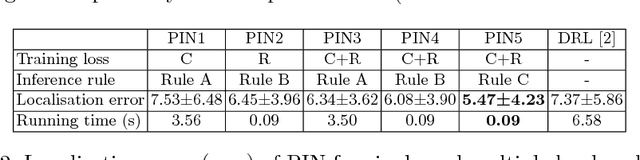

We propose a new Patch-based Iterative Network (PIN) for fast and accurate landmark localisation in 3D medical volumes. PIN utilises a Convolutional Neural Network (CNN) to learn the spatial relationship between an image patch and anatomical landmark positions. During inference, patches are repeatedly passed to the CNN until the estimated landmark position converges to the true landmark location. PIN is computationally efficient since the inference stage only selectively samples a small number of patches in an iterative fashion rather than a dense sampling at every location in the volume. Our approach adopts a multi-task learning framework that combines regression and classification to improve localisation accuracy. We extend PIN to localise multiple landmarks by using principal component analysis, which models the global anatomical relationships between landmarks. We have evaluated PIN using 72 3D ultrasound images from fetal screening examinations. PIN achieves quantitatively an average landmark localisation error of 5.59mm and a runtime of 0.44s to predict 10 landmarks per volume. Qualitatively, anatomical 2D standard scan planes derived from the predicted landmark locations are visually similar to the clinical ground truth. Source code is publicly available at https://github.com/yuanwei1989/landmark-detection.
* 8 pages, 4 figures, Accepted for MICCAI 2018
Attention-Gated Networks for Improving Ultrasound Scan Plane Detection
Apr 15, 2018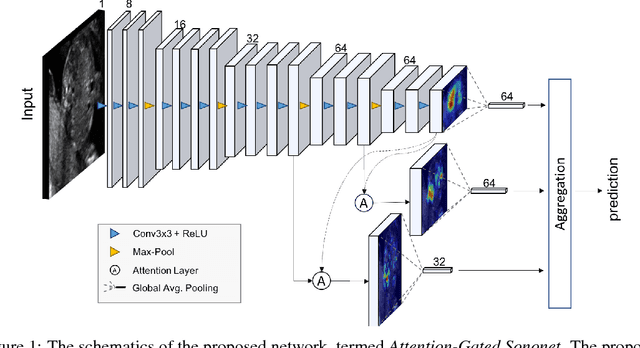
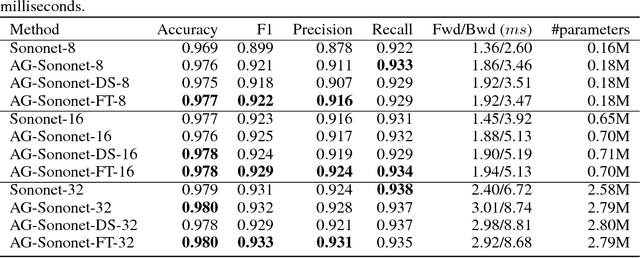
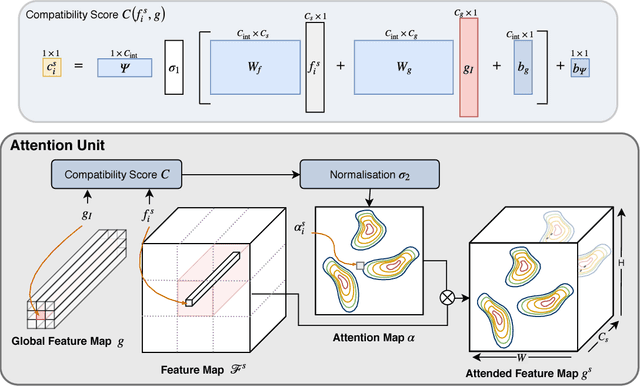
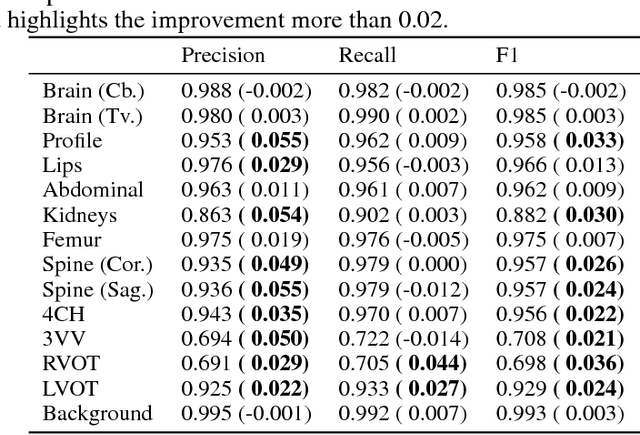
In this work, we apply an attention-gated network to real-time automated scan plane detection for fetal ultrasound screening. Scan plane detection in fetal ultrasound is a challenging problem due the poor image quality resulting in low interpretability for both clinicians and automated algorithms. To solve this, we propose incorporating self-gated soft-attention mechanisms. A soft-attention mechanism generates a gating signal that is end-to-end trainable, which allows the network to contextualise local information useful for prediction. The proposed attention mechanism is generic and it can be easily incorporated into any existing classification architectures, while only requiring a few additional parameters. We show that, when the base network has a high capacity, the incorporated attention mechanism can provide efficient object localisation while improving the overall performance. When the base network has a low capacity, the method greatly outperforms the baseline approach and significantly reduces false positives. Lastly, the generated attention maps allow us to understand the model's reasoning process, which can also be used for weakly supervised object localisation.