 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Small Solution Hypothesis for MAPF on Directed Graphs Is True
Oct 11, 2022
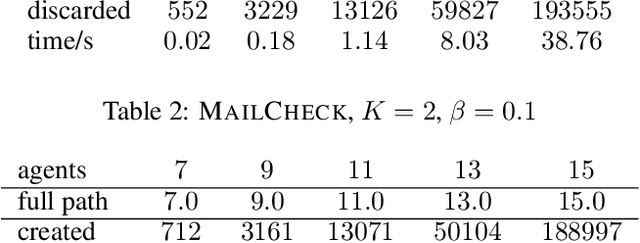
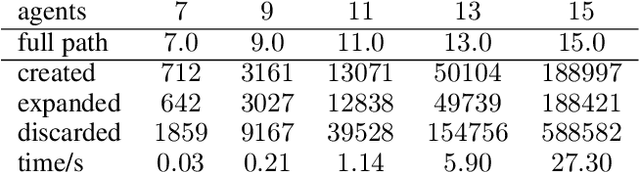
The determination of the computational complexity of multi-agent pathfinding on directed graphs has been an open problem for many years. Only recently, it has been established that the problem is NP-hard. Further, it has been proved that it is in NP, provided the short solution hypothesis for strongly connected digraphs holds. In this paper, it is shown that this hypothesis is indeed true.
Expressivity of Planning with Horn Description Logic Ontologies (Technical Report)
Mar 17, 2022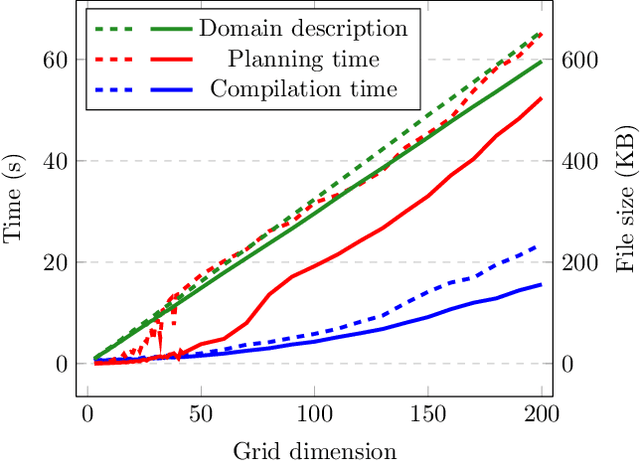

State constraints in AI Planning globally restrict the legal environment states. Standard planning languages make closed-domain and closed-world assumptions. Here we address open-world state constraints formalized by planning over a description logic (DL) ontology. Previously, this combination of DL and planning has been investigated for the light-weight DL DL-Lite. Here we propose a novel compilation scheme into standard PDDL with derived predicates, which applies to more expressive DLs and is based on the rewritability of DL queries into Datalog with stratified negation. We also provide a new rewritability result for the DL Horn-ALCHOIQ, which allows us to apply our compilation scheme to quite expressive ontologies. In contrast, we show that in the slight extension Horn-SROIQ no such compilation is possible unless the weak exponential hierarchy collapses. Finally, we show that our approach can outperform previous work on existing benchmarks for planning with DL ontologies, and is feasible on new benchmarks taking advantage of more expressive ontologies. That is an extended version of a paper accepted at AAAI 22.
On the Computational Complexity of Multi-Agent Pathfinding on Directed Graphs
Nov 11, 2019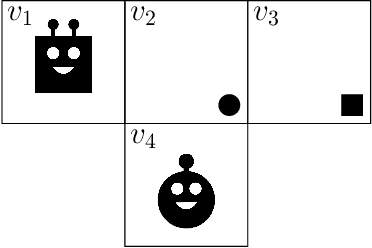
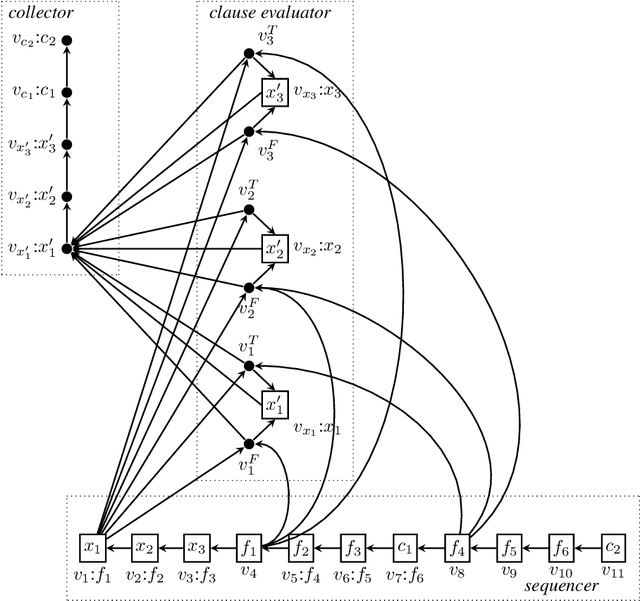
The determination of the computational complexity of multi-agent pathfinding on directed graphs has been an open problem for many years. For undirected graphs, solvability can be decided in polynomial time, as has been shown already in the eighties. Further, recently it has been shown that a special case on directed graphs is solvable in polynomial time. In this paper, we show that the problem is NP-hard in the general case. In addition, some upper bounds are proven.
Acting Thoughts: Towards a Mobile Robotic Service Assistant for Users with Limited Communication Skills
Jun 12, 2018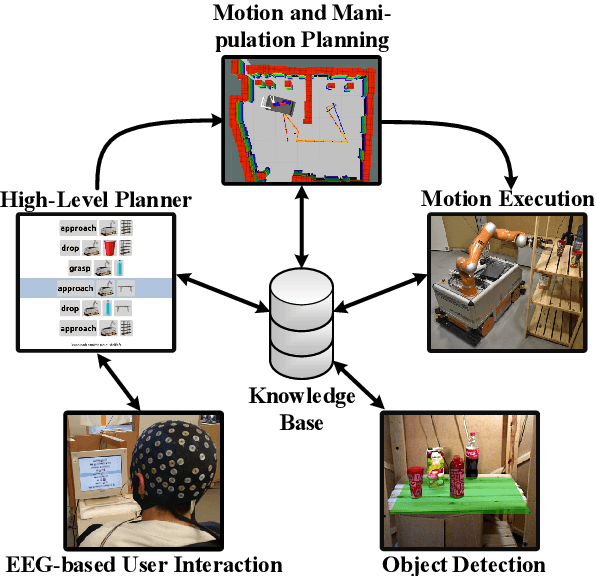
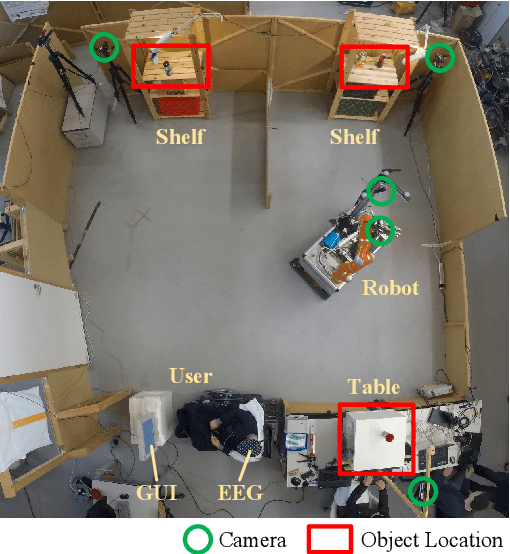
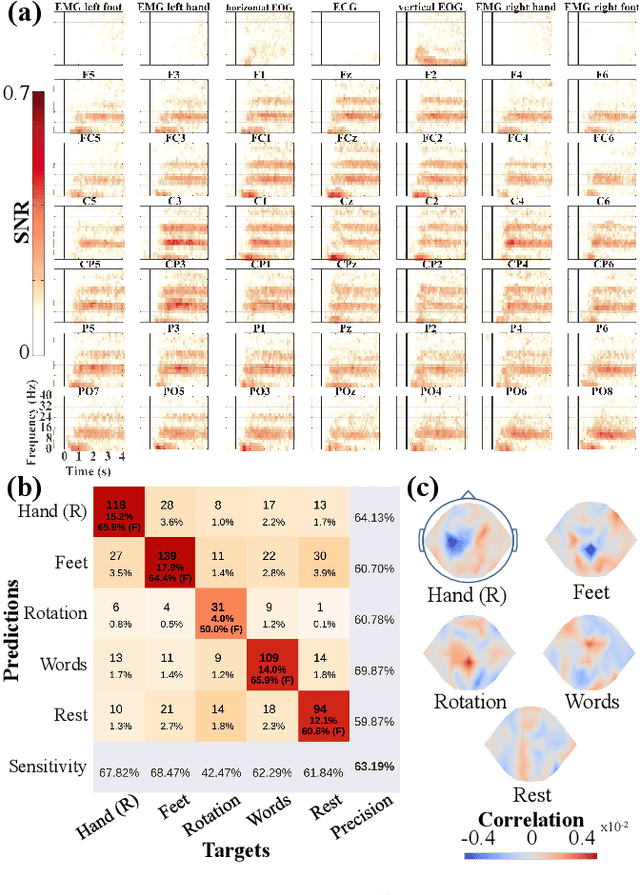
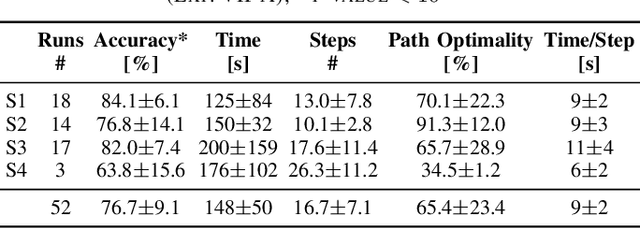
As autonomous service robots become more affordable and thus available also for the general public, there is a growing need for user friendly interfaces to control the robotic system. Currently available control modalities typically expect users to be able to express their desire through either touch, speech or gesture commands. While this requirement is fulfilled for the majority of users, paralyzed users may not be able to use such systems. In this paper, we present a novel framework, that allows these users to interact with a robotic service assistant in a closed-loop fashion, using only thoughts. The brain-computer interface (BCI) system is composed of several interacting components, i.e., non-invasive neuronal signal recording and decoding, high-level task planning, motion and manipulation planning as well as environment perception. In various experiments, we demonstrate its applicability and robustness in real world scenarios, considering fetch-and-carry tasks and tasks involving human-robot interaction. As our results demonstrate, our system is capable of adapting to frequent changes in the environment and reliably completing given tasks within a reasonable amount of time. Combined with high-level planning and autonomous robotic systems, interesting new perspectives open up for non-invasive BCI-based human-robot interactions.
* * FB, LDJF, DK, MV and JA contributed equally to the work. Accepted as a conference paper at the European Conference on Mobile Robotics 2017 (ECMR 2017), 6 pages, 3 figures
Cooperative Epistemic Multi-Agent Planning for Implicit Coordination
Mar 07, 2017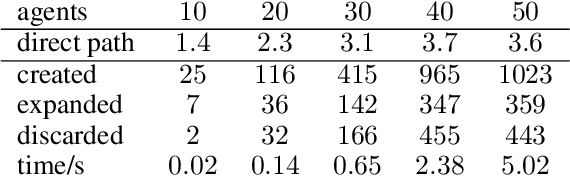
Epistemic planning can be used for decision making in multi-agent situations with distributed knowledge and capabilities. Recently, Dynamic Epistemic Logic (DEL) has been shown to provide a very natural and expressive framework for epistemic planning. We extend the DEL-based epistemic planning framework to include perspective shifts, allowing us to define new notions of sequential and conditional planning with implicit coordination. With these, it is possible to solve planning tasks with joint goals in a decentralized manner without the agents having to negotiate about and commit to a joint policy at plan time. First we define the central planning notions and sketch the implementation of a planning system built on those notions. Afterwards we provide some case studies in order to evaluate the planner empirically and to show that the concept is useful for multi-agent systems in practice.
* In Proceedings M4M9 2017, arXiv:1703.01736