 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Heuristic Selection with Dynamic Algorithm Configuration
Jun 15, 2020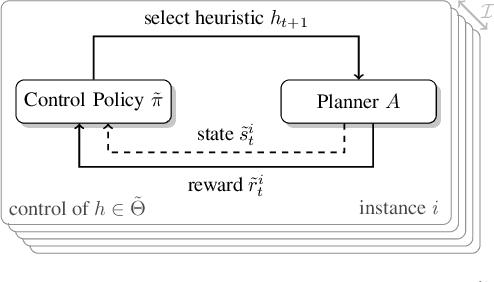
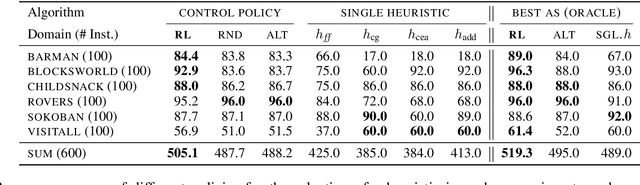
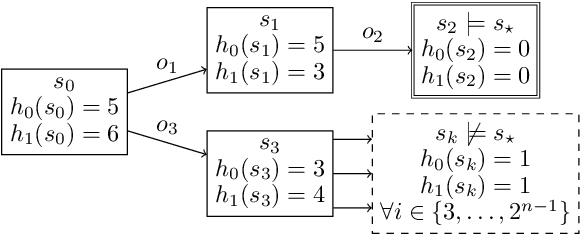

A key challenge in satisfying planning is to use multiple heuristics within one heuristic search. An aggregation of multiple heuristic estimates, for example by taking the maximum, has the disadvantage that bad estimates of a single heuristic can negatively affect the whole search. Since the performance of a heuristic varies from instance to instance, approaches such as algorithm selection can be successfully applied. In addition, alternating between multiple heuristics during the search makes it possible to use all heuristics equally and improve performance. However, all these approaches ignore the internal search dynamics of a planning system, which can help to select the most helpful heuristics for the current expansion step. We show that dynamic algorithm configuration can be used for dynamic heuristic selection which takes into account the internal search dynamics of a planning system. Furthermore, we prove that this approach generalizes over existing approaches and that it can exponentially improve the performance of the heuristic search. To learn dynamic heuristic selection, we propose an approach based on reinforcement learning and show empirically that domain-wise learned policies, which take the internal search dynamics of a planning system into account, can exceed existing approaches in terms of coverage.
Cooperative Epistemic Multi-Agent Planning for Implicit Coordination
Mar 07, 2017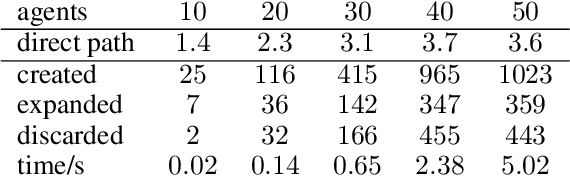
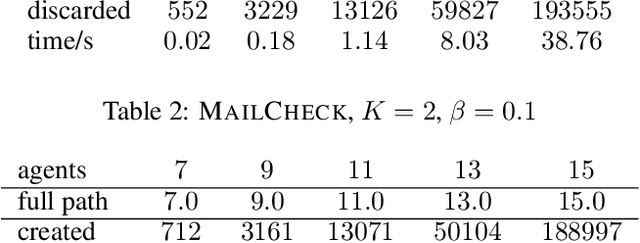
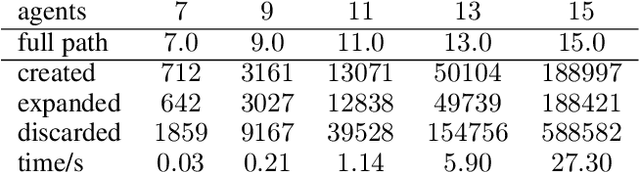
Epistemic planning can be used for decision making in multi-agent situations with distributed knowledge and capabilities. Recently, Dynamic Epistemic Logic (DEL) has been shown to provide a very natural and expressive framework for epistemic planning. We extend the DEL-based epistemic planning framework to include perspective shifts, allowing us to define new notions of sequential and conditional planning with implicit coordination. With these, it is possible to solve planning tasks with joint goals in a decentralized manner without the agents having to negotiate about and commit to a joint policy at plan time. First we define the central planning notions and sketch the implementation of a planning system built on those notions. Afterwards we provide some case studies in order to evaluate the planner empirically and to show that the concept is useful for multi-agent systems in practice.
* In Proceedings M4M9 2017, arXiv:1703.01736