 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Pouring with an Autonomous Robot Using an RGB-D Camera
Oct 08, 2018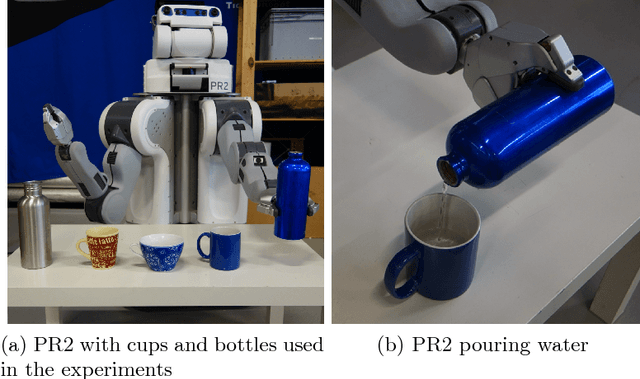
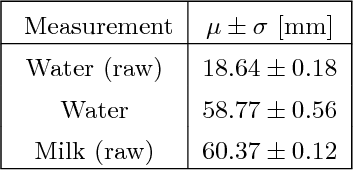

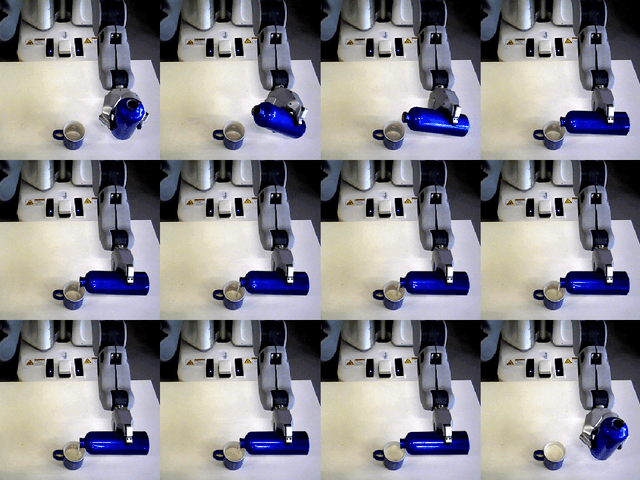
Robotic assistants in a home environment are expected to perform various complex tasks for their users. One particularly challenging task is pouring drinks into cups, which for successful completion, requires the detection and tracking of the liquid level during a pour to determine when to stop. In this paper, we present a novel approach to autonomous pouring that tracks the liquid level using an RGB-D camera and adapts the rate of pouring based on the liquid level feedback. We thoroughly evaluate our system on various types of liquids and under different conditions, conducting over 250 pours with a PR2 robot. The results demonstrate that our approach is able to pour liquids to a target height with an accuracy of a few millimeters.
Acting Thoughts: Towards a Mobile Robotic Service Assistant for Users with Limited Communication Skills
Jun 12, 2018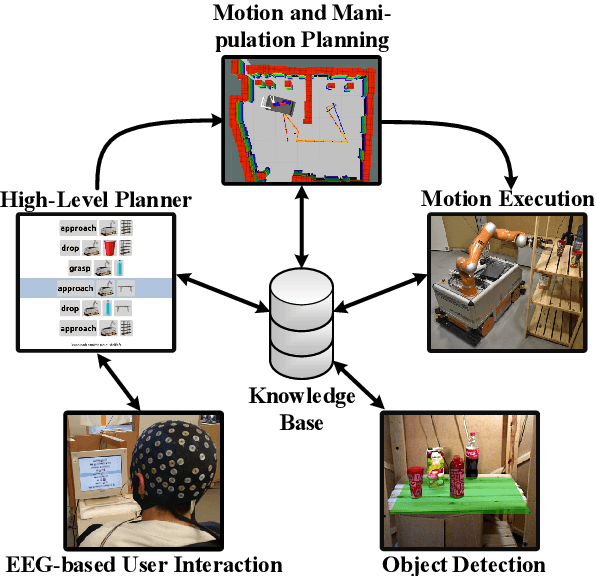
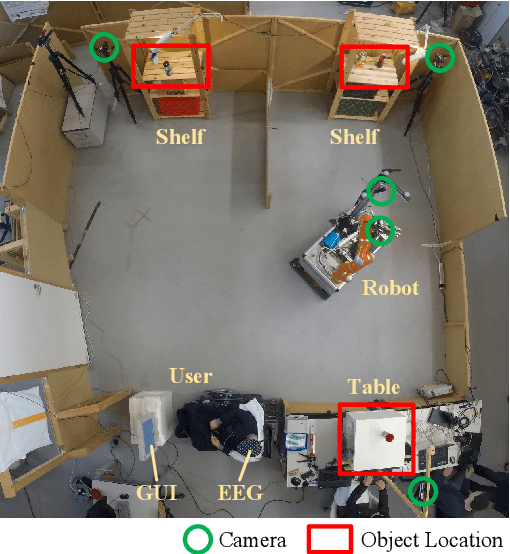
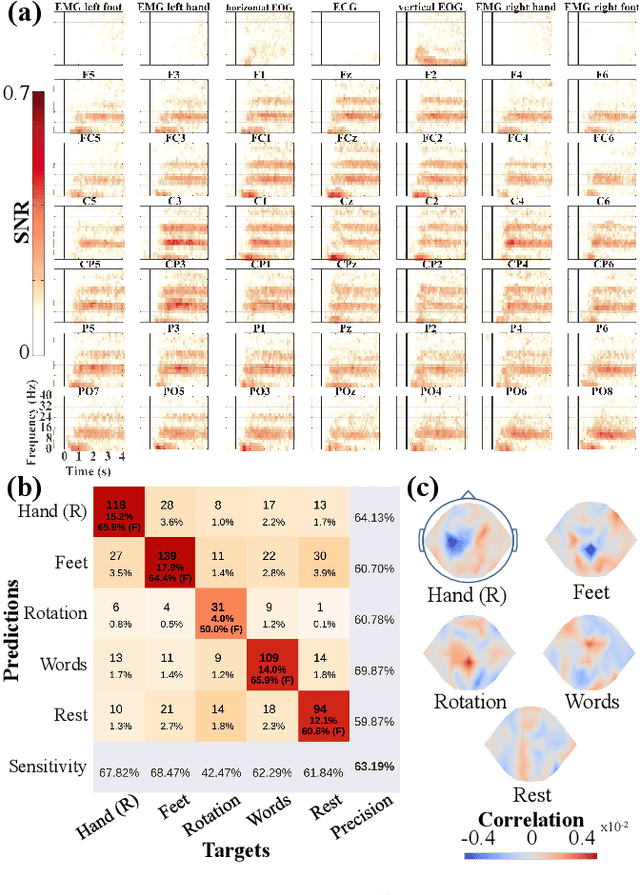
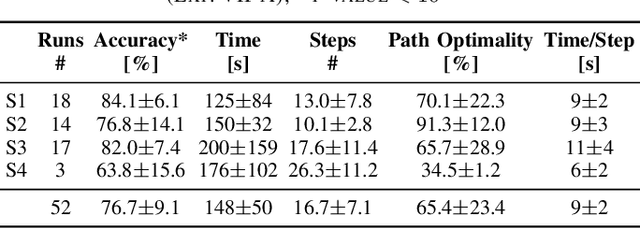
As autonomous service robots become more affordable and thus available also for the general public, there is a growing need for user friendly interfaces to control the robotic system. Currently available control modalities typically expect users to be able to express their desire through either touch, speech or gesture commands. While this requirement is fulfilled for the majority of users, paralyzed users may not be able to use such systems. In this paper, we present a novel framework, that allows these users to interact with a robotic service assistant in a closed-loop fashion, using only thoughts. The brain-computer interface (BCI) system is composed of several interacting components, i.e., non-invasive neuronal signal recording and decoding, high-level task planning, motion and manipulation planning as well as environment perception. In various experiments, we demonstrate its applicability and robustness in real world scenarios, considering fetch-and-carry tasks and tasks involving human-robot interaction. As our results demonstrate, our system is capable of adapting to frequent changes in the environment and reliably completing given tasks within a reasonable amount of time. Combined with high-level planning and autonomous robotic systems, interesting new perspectives open up for non-invasive BCI-based human-robot interactions.
* * FB, LDJF, DK, MV and JA contributed equally to the work. Accepted as a conference paper at the European Conference on Mobile Robotics 2017 (ECMR 2017), 6 pages, 3 figures
Using MathML to Represent Units of Measurement for Improved Ontology Alignment
Jul 05, 2013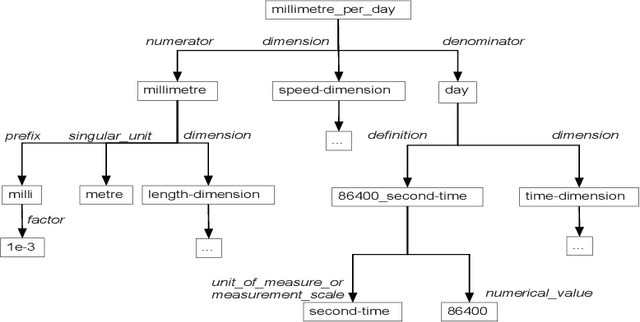
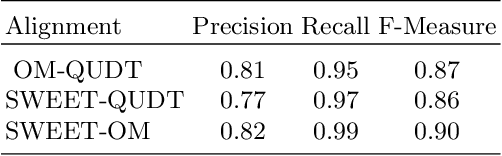
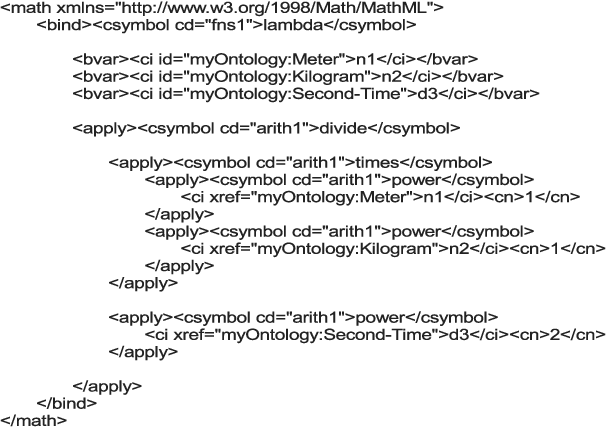
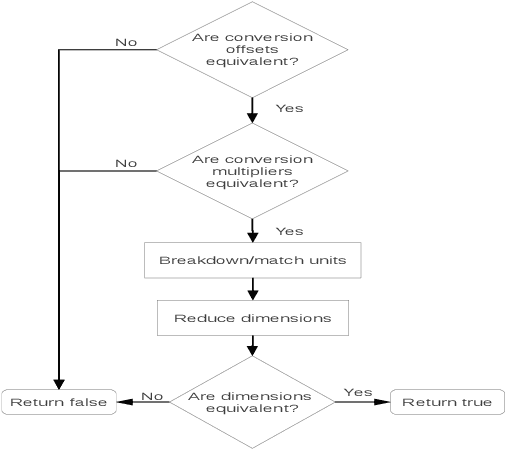
Ontologies provide a formal description of concepts and their relationships in a knowledge domain. The goal of ontology alignment is to identify semantically matching concepts and relationships across independently developed ontologies that purport to describe the same knowledge. In order to handle the widest possible class of ontologies, many alignment algorithms rely on terminological and structural meth- ods, but the often fuzzy nature of concepts complicates the matching process. However, one area that should provide clear matching solutions due to its mathematical nature, is units of measurement. Several on- tologies for units of measurement are available, but there has been no attempt to align them, notwithstanding the obvious importance for tech- nical interoperability. We propose a general strategy to map these (and similar) ontologies by introducing MathML to accurately capture the semantic description of concepts specified therein. We provide mapping results for three ontologies, and show that our approach improves on lexical comparisons.
* Conferences on Intelligent Computer Mathematics (CICM 2013), Bath, England