Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Pouring with an Autonomous Robot Using an RGB-D Camera
Paper and Code
Oct 08, 2018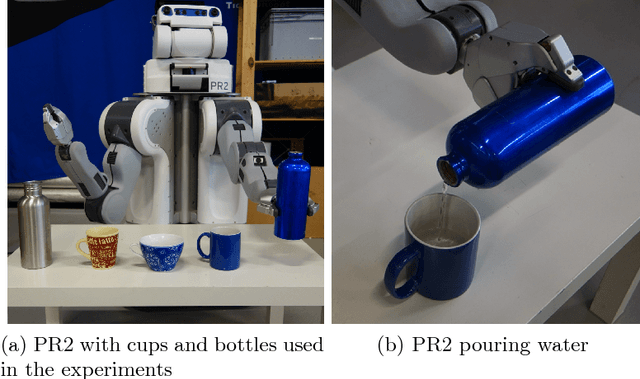
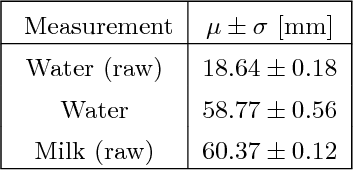

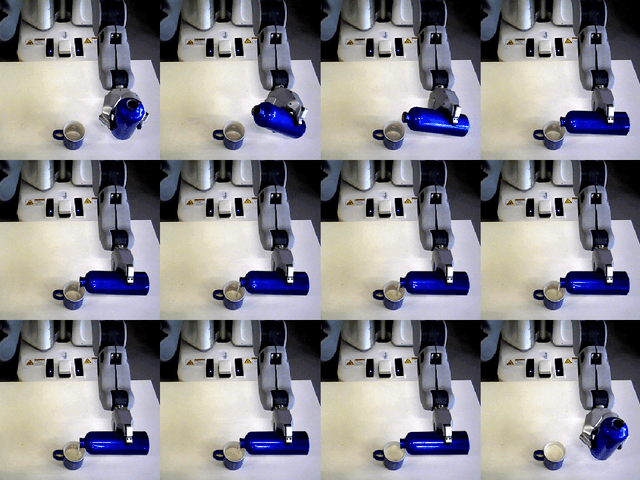
Robotic assistants in a home environment are expected to perform various complex tasks for their users. One particularly challenging task is pouring drinks into cups, which for successful completion, requires the detection and tracking of the liquid level during a pour to determine when to stop. In this paper, we present a novel approach to autonomous pouring that tracks the liquid level using an RGB-D camera and adapts the rate of pouring based on the liquid level feedback. We thoroughly evaluate our system on various types of liquids and under different conditions, conducting over 250 pours with a PR2 robot. The results demonstrate that our approach is able to pour liquids to a target height with an accuracy of a few millimeters.
* 12 pages
View paper on