 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Robots to Support Parent-Child Connections: Opportunities Through Robot-Mediated Communication
Apr 27, 2026The sense of family connectedness may support positive outcomes including individual well-being, resilience, and healthy family functioning. However, as technologies advance, they often replace human-human interactions instead of nurturing them. In this work, we investigate how robot-facilitated communication tools might instead create new opportunities for family connection. We conducted two studies with families with children aged 5-12. We first explored the design space through in-home technology probe sessions with six families. These probes inspired us to explore two key interaction design dimensions: the robot's behavior strategy (passive, reactive, proactive) and the mode of communication (synchronous, asynchronous). We then conducted a laboratory study with 20 families to examine how the two dimensions shaped parent-child interaction and connection. Our findings characterize how parents and children appropriated robot-mediated exchanges, the tensions they experienced around initiative, timing, and privacy, and the opportunities they envisioned for supporting everyday connectedness.
"It's like a pet...but my pet doesn't collect data about me": Multi-person Households' Privacy Design Preferences for Household Robots
Feb 19, 2026Household robots boasting mobility, more sophisticated sensors, and powerful processing models have become increasingly prevalent in the commercial market. However, these features may expose users to unwanted privacy risks, including unsolicited data collection and unauthorized data sharing. While security and privacy researchers thus far have explored people's privacy concerns around household robots, literature investigating people's preferred privacy designs and mitigation strategies is still limited. Additionally, the existing literature has not yet accounted for multi-user perspectives on privacy design and household robots. We aimed to fill this gap by conducting in-person participatory design sessions with 15 households to explore how they would design a privacy-aware household robot based on their concerns and expectations. We found that participants did not trust that robots, or their respective manufacturers, would respect the data privacy of household members or operate in a multi-user ecosystem without jeopardizing users' personal data. Based on these concerns, they generated designs that gave them authority over their data, contained accessible controls and notification systems, and could be customized and tailored to suit the needs and preferences of each user over time. We synthesize our findings into actionable design recommendations for robot manufacturers and developers.
"Impressively Scary:" Exploring User Perceptions and Reactions to Unraveling Machine Learning Models in Social Media Applications
Mar 05, 2025Machine learning models deployed locally on social media applications are used for features, such as face filters which read faces in-real time, and they expose sensitive attributes to the apps. However, the deployment of machine learning models, e.g., when, where, and how they are used, in social media applications is opaque to users. We aim to address this inconsistency and investigate how social media user perceptions and behaviors change once exposed to these models. We conducted user studies (N=21) and found that participants were unaware to both what the models output and when the models were used in Instagram and TikTok, two major social media platforms. In response to being exposed to the models' functionality, we observed long term behavior changes in 8 participants. Our analysis uncovers the challenges and opportunities in providing transparency for machine learning models that interact with local user data.
Robots in Family Routines: Development of and Initial Insights from the Family-Robot Routines Inventory
Jun 17, 2024
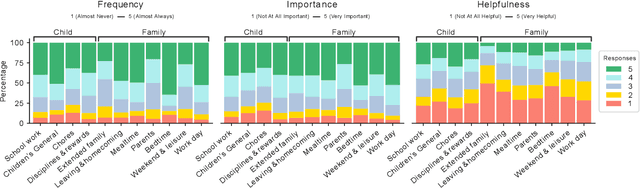
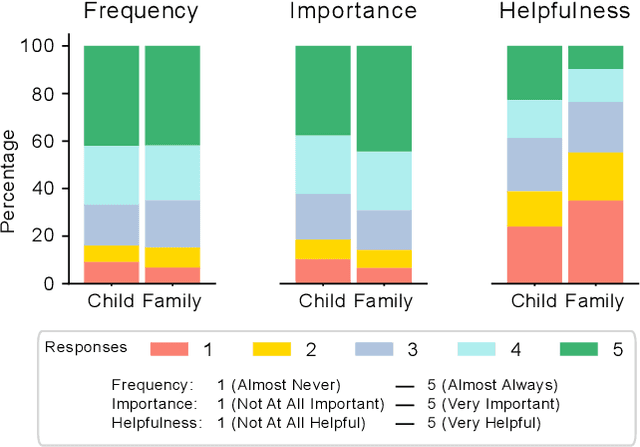
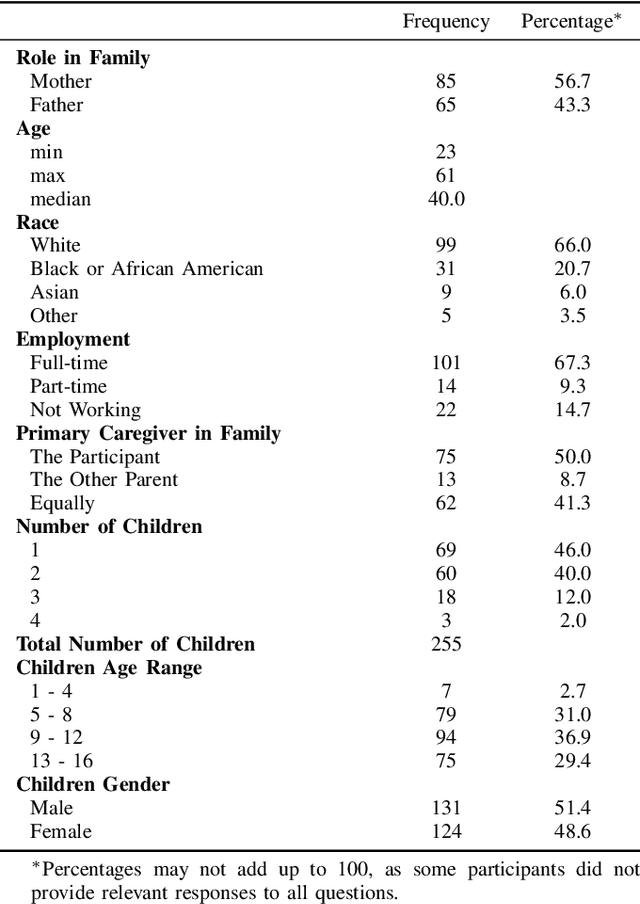
Despite advances in areas such as the personalization of robots, sustaining adoption of robots for long-term use in families remains a challenge. Recent studies have identified integrating robots into families' routines and rituals as a promising approach to support long-term adoption. However, few studies explored the integration of robots into family routines and there is a gap in systematic measures to capture family preferences for robot integration. Building upon existing routine inventories, we developed Family-Robot Routines Inventory (FRRI), with 24 family routines and 24 child routine items, to capture parents' attitudes toward and expectations from the integration of robotic technology into their family routines. Using this inventory, we collected data from 150 parents through an online survey. Our analysis indicates that parents had varying perceptions for the utility of integrating robots into their routines. For example, parents found robot integration to be more helpful in children's individual routines, than to the collective routines of their families. We discuss the design implications of these preliminary findings, and how they may serve as a first step toward understanding the diverse challenges and demands of designing and integrating household robots for families.
Toward Family-Robot Interactions: A Family-Centered Framework in HRI
Jan 25, 2024

As robotic products become more integrated into daily life, there is a greater need to understand authentic and real-world human-robot interactions to inform product design. Across many domestic, educational, and public settings, robots interact with not only individuals and groups of users, but also families, including children, parents, relatives, and even pets. However, products developed to date and research in human-robot and child-robot interactions have focused on the interaction with their primary users, neglecting the complex and multifaceted interactions between family members and with the robot. There is a significant gap in knowledge, methods, and theories for how to design robots to support these interactions. To inform the design of robots that can support and enhance family life, this paper provides (1) a narrative review exemplifying the research gap and opportunities for family-robot interactions and (2) an actionable family-centered framework for research and practices in human-robot and child-robot interaction.
"My Unconditional Homework Buddy:'' Exploring Children's Preferences for a Homework Companion Robot
May 04, 2023


We aim to design robotic educational support systems that can promote socially and intellectually meaningful learning experiences for students while they complete school work outside of class. To pursue this goal, we conducted participatory design studies with 10 children (aged 10--12) to explore their design needs for robot-assisted homework. We investigated children's current ways of doing homework, the type of support they receive while doing homework, and co-designed the speech and expressiveness of a homework companion robot. Children and parents attending our design sessions explained that an emotionally expressive social robot as a homework aid can support students' motivation and engagement, as well as their affective state. Children primarily perceived the robot as a dedicated assistant at home, capable of forming meaningful friendships, or a shared classroom learning resource. We present key design recommendations to support students' homework experiences with a learning companion robot.
Family Theories in Child-Robot Interactions: Understanding Families as a Whole for Child-Robot Interaction Design
May 04, 2023
In this work, we discuss a theoretically motivated family-centered design approach for child-robot interactions, adapted by Family Systems Theory (FST) and Family Ecological Model (FEM). Long-term engagement and acceptance of robots in the home is influenced by factors that surround the child and the family, such as child-sibling-parent relationships and family routines, rituals, and values. A family-centered approach to interaction design is essential when developing in-home technology for children, especially for social agents like robots with which they can form connections and relationships. We review related literature in family theories and connect it with child-robot interaction and child-computer interaction research. We present two case studies that exemplify how family theories, FST and FEM, can inform the integration of robots into homes, particularly research into child-robot and family-robot interaction. Finally, we pose five overarching recommendations for a family-centered design approach in child-robot interactions.
Exploring the Use of Collaborative Robots in Cinematography
Apr 16, 2023Robotic technology can support the creation of new tools that improve the creative process of cinematography. It is crucial to consider the specific requirements and perspectives of industry professionals when designing and developing these tools. In this paper, we present the results from exploratory interviews with three cinematography practitioners, which included a demonstration of a prototype robotic system. We identified many factors that can impact the design, adoption, and use of robotic support for cinematography, including: (1) the ability to meet requirements for cost, quality, mobility, creativity, and reliability; (2) the compatibility and integration of tools with existing workflows, equipment, and software; and (3) the potential for new creative opportunities that robotic technology can open up. Our findings provide a starting point for future co-design projects that aim to support the work of cinematographers with collaborative robots.
Exploring Children's Preferences for Taking Care of a Social Robot
May 18, 2022

Research in child-robot interactions suggests that engaging in "care-taking" of a social robot, such as tucking the robot in at night, can strengthen relationships formed between children and robots. In this work, we aim to better understand and explore the design space of caretaking activities with 10 children, aged 8--12 from eight families, involving an exploratory design session followed by a preliminary feasibility testing of robot caretaking activities. The design sessions provided insight into children's current caretaking tasks, how they would take care of a social robot, and how these new caretaking activities could be integrated into their daily routines. The feasibility study tested two different types of robot caretaking tasks, which we call connection and utility, and measured their short term effects on children's perceptions of and closeness to the social robot. We discuss the themes and present interaction design guidelines of robot caretaking activities for children.
Understanding Factors that Shape Children's Long Term Engagement with an In-Home Learning Companion Robot
May 18, 2022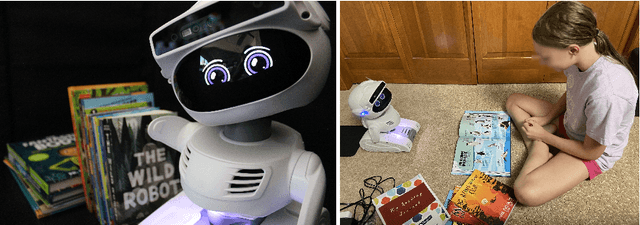
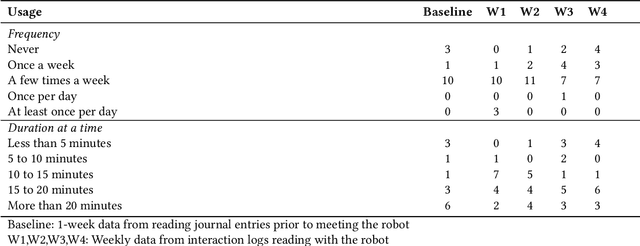
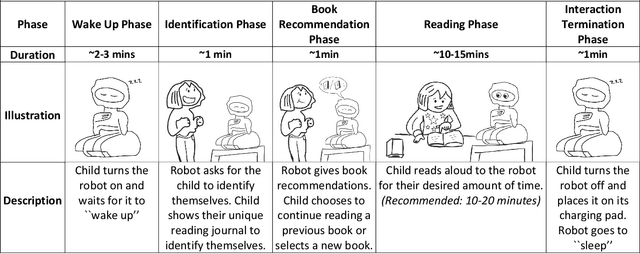
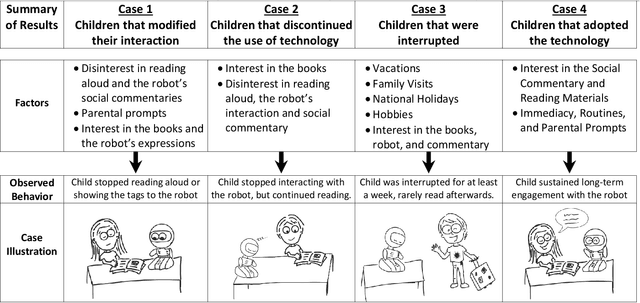
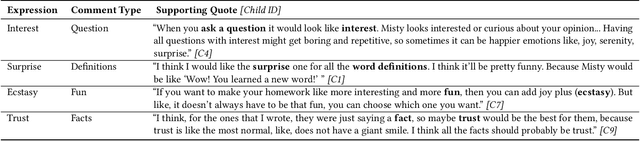
Social robots are emerging as learning companions for children, and research shows that they facilitate the development of interest and learning even through brief interactions. However, little is known about how such technologies might support these goals in authentic environments over long-term periods of use and interaction. We designed a learning companion robot capable of supporting children reading popular-science books by expressing social and informational commentaries. We deployed the robot in homes of 14 families with children aged 10-12 for four weeks during the summer. Our analysis revealed critical factors that affected children's long-term engagement and adoption of the robot, including external factors such as vacations, family visits, and extracurricular activities; family/parental involvement; and children's individual interests. We present four in-depth cases that illustrate these factors and demonstrate their impact on children's reading experiences and discuss the implications of our findings for robot design.