 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Robots for Families: In-Situ Prototyping for Contextual Reminders on Family Routines
Feb 26, 2026Robots are increasingly entering the daily lives of families, yet their successful integration into domestic life remains a challenge. We explore family routines as a critical entry point for understanding how robots might find a sustainable role in everyday family settings. Together with each of the ten families, we co-designed robot interactions and behaviors, and a plan for the robot to support their chosen routines, accounting for contextual factors such as timing, participants, locations, and the activities in the environment. We then designed, prototyped, and deployed a mobile social robot as a four-day, in-home user study. Families welcomed the robot's reminders, with parents especially appreciating the offloading of some reminding tasks. At the same time, interviews revealed tensions around timing, authority, and family dynamics, highlighting the complexity of integrating robots into households beyond the immediate task of reminders. Based on these insights, we offer design implications for robot-facilitated contextual reminders and discuss broader considerations for designing robots for family settings.
Connection-Coordination Rapport (CCR) Scale: A Dual-Factor Scale to Measure Human-Robot Rapport
Jan 21, 2025



Robots, particularly in service and companionship roles, must develop positive relationships with people they interact with regularly to be successful. These positive human-robot relationships can be characterized as establishing "rapport," which indicates mutual understanding and interpersonal connection that form the groundwork for successful long-term human-robot interaction. However, the human-robot interaction research literature lacks scale instruments to assess human-robot rapport in a variety of situations. In this work, we developed the 18-item Connection-Coordination Rapport (CCR) Scale to measure human-robot rapport. We first ran Study 1 (N = 288) where online participants rated videos of human-robot interactions using a set of candidate items. Our Study 1 results showed the discovery of two factors in our scale, which we named "Connection" and "Coordination." We then evaluated this scale by running Study 2 (N = 201) where online participants rated a new set of human-robot interaction videos with our scale and an existing rapport scale from virtual agents research for comparison. We also validated our scale by replicating a prior in-person human-robot interaction study, Study 3 (N = 44), and found that rapport is rated significantly greater when participants interacted with a responsive robot (responsive condition) as opposed to an unresponsive robot (unresponsive condition). Results from these studies demonstrate high reliability and validity for the CCR scale, which can be used to measure rapport in both first-person and third-person perspectives. We encourage the adoption of this scale in future studies to measure rapport in a variety of human-robot interactions.
Robots in Family Routines: Development of and Initial Insights from the Family-Robot Routines Inventory
Jun 17, 2024
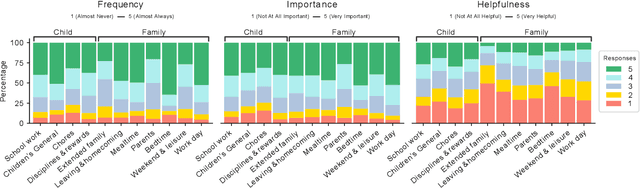
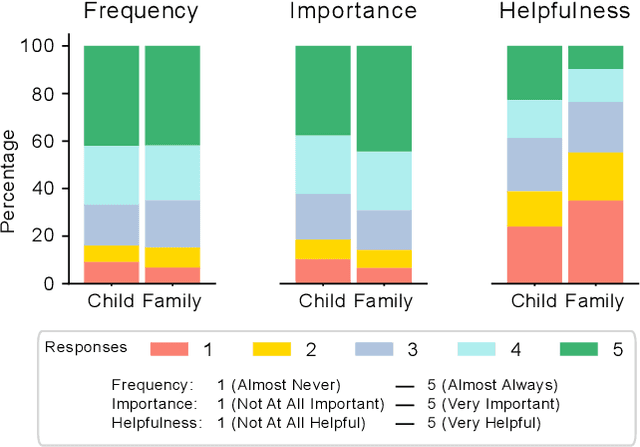
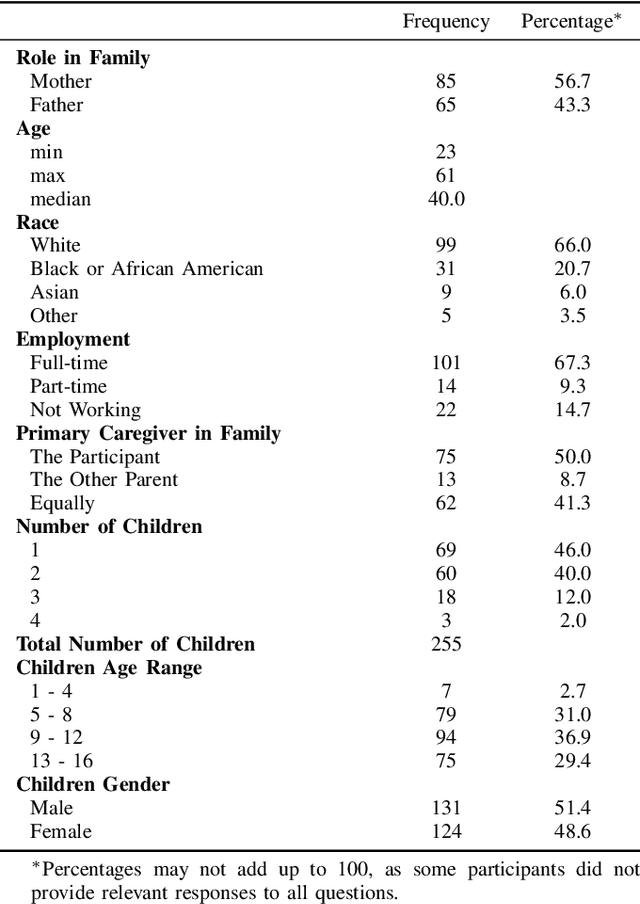
Despite advances in areas such as the personalization of robots, sustaining adoption of robots for long-term use in families remains a challenge. Recent studies have identified integrating robots into families' routines and rituals as a promising approach to support long-term adoption. However, few studies explored the integration of robots into family routines and there is a gap in systematic measures to capture family preferences for robot integration. Building upon existing routine inventories, we developed Family-Robot Routines Inventory (FRRI), with 24 family routines and 24 child routine items, to capture parents' attitudes toward and expectations from the integration of robotic technology into their family routines. Using this inventory, we collected data from 150 parents through an online survey. Our analysis indicates that parents had varying perceptions for the utility of integrating robots into their routines. For example, parents found robot integration to be more helpful in children's individual routines, than to the collective routines of their families. We discuss the design implications of these preliminary findings, and how they may serve as a first step toward understanding the diverse challenges and demands of designing and integrating household robots for families.
Teaching Introductory HRI: UChicago Course "Human-Robot Interaction: Research and Practice"
Mar 27, 2024

In 2020, I designed the course CMSC 20630/30630 Human-Robot Interaction: Research and Practice as a hands-on introduction to human-robot interaction (HRI) research for both undergraduate and graduate students at the University of Chicago. Since 2020, I have taught and refined this course each academic year. Human-Robot Interaction: Research and Practice focuses on the core concepts and cutting-edge research in the field of human-robot interaction (HRI), covering topics that include: nonverbal robot behavior, verbal robot behavior, social dynamics, norms & ethics, collaboration & learning, group interactions, applications, and future challenges of HRI. Course meetings involve students in the class leading discussions about cutting-edge peer-reviewed research HRI publications. Students also participate in a quarter-long collaborative research project, where they pursue an HRI research question that often involves conducing their own human-subjects research study where they recruit human subjects to interact with a robot. In this paper, I detail the structure of the course and its learning goals as well as my reflections and student feedback on the course.
Exploring Children's Preferences for Taking Care of a Social Robot
May 18, 2022

Research in child-robot interactions suggests that engaging in "care-taking" of a social robot, such as tucking the robot in at night, can strengthen relationships formed between children and robots. In this work, we aim to better understand and explore the design space of caretaking activities with 10 children, aged 8--12 from eight families, involving an exploratory design session followed by a preliminary feasibility testing of robot caretaking activities. The design sessions provided insight into children's current caretaking tasks, how they would take care of a social robot, and how these new caretaking activities could be integrated into their daily routines. The feasibility study tested two different types of robot caretaking tasks, which we call connection and utility, and measured their short term effects on children's perceptions of and closeness to the social robot. We discuss the themes and present interaction design guidelines of robot caretaking activities for children.