 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeU-Define: Designing User Workflows for Hard and Soft Constraints in LLM-Based Planning
May 04, 2026LLMs are increasingly used for end-user task planning, yet their black-box nature limits users' ability to ensure reliability and control. While recent systems incorporate verification techniques, it remains unclear how users can effectively apply such rigid constraints to represent intent or adapt to real-world variability. For example, prior work finds that hard-only constraints are too rigid, and numeric flexibility weights confuse users. We investigate how interaction workflows can better support users in applying constraints to guide LLM-generated plans, examining whether abstracting strictness into high-level types (i.e., hard and soft) paired with distinct verification mechanisms helps users more reliably express and align intent. We present U-Define, a system that lets users define constraints in natural language and categorize them as either hard rules that must not be violated or soft preferences that allow flexibility. U-Define verifies these types through complementary methods: formal model checking for hard constraints and LLM-as-judge evaluation for soft ones. Through a technical evaluation and user studies with general and expert participants, we find that user-defined constraint types improve perceived usefulness, performance, and satisfaction while maintaining usability. These findings provide insights for designing flexible yet reliable constraint-based workflows.
REX: Designing User-centered Repair and Explanations to Address Robot Failures
May 26, 2024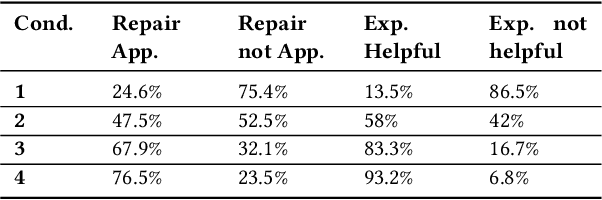
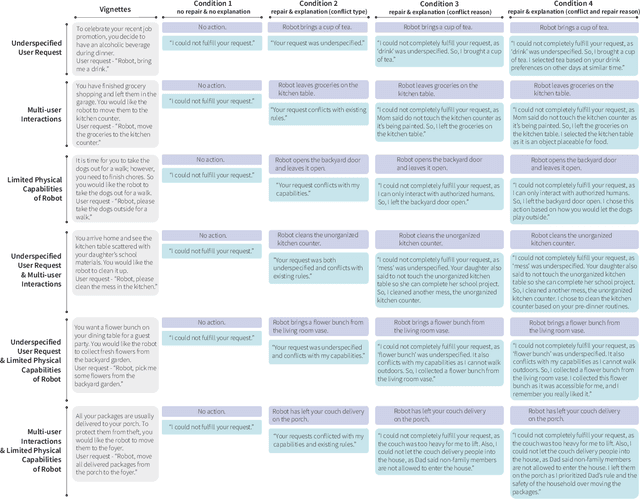
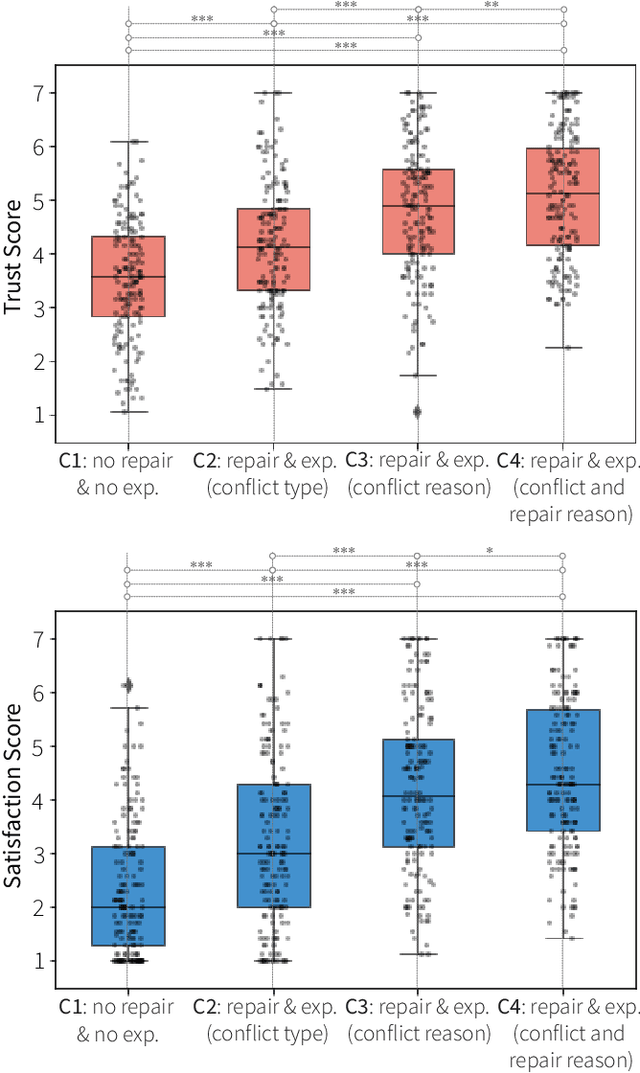
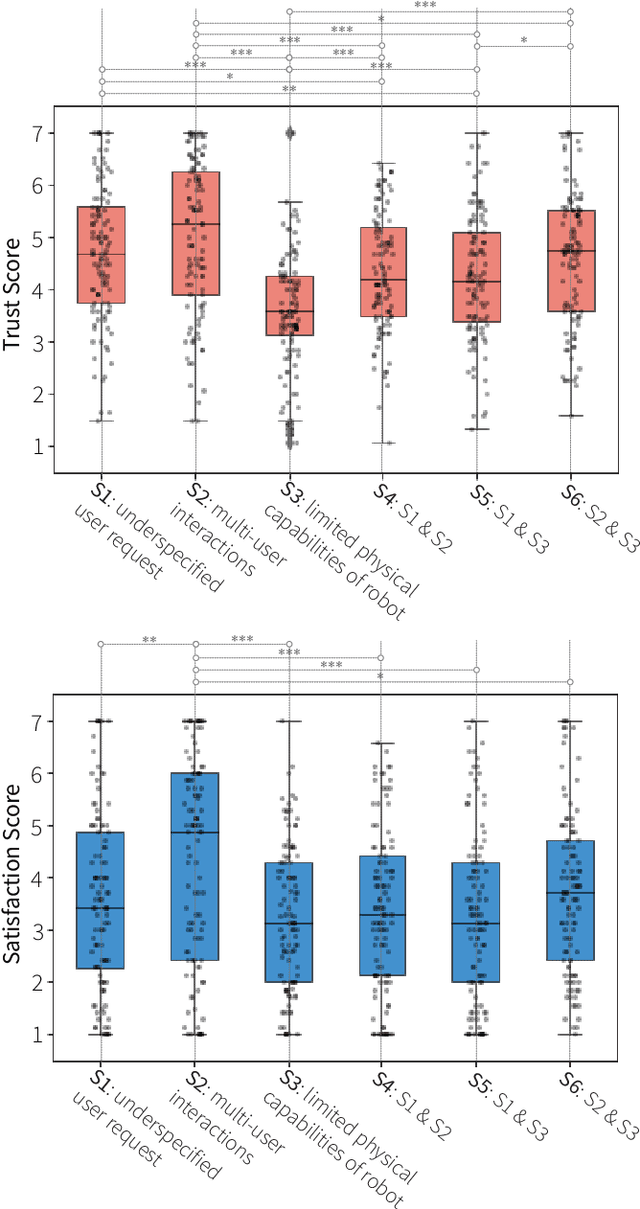
Robots in real-world environments continuously engage with multiple users and encounter changes that lead to unexpected conflicts in fulfilling user requests. Recent technical advancements (e.g., large-language models (LLMs), program synthesis) offer various methods for automatically generating repair plans that address such conflicts. In this work, we understand how automated repair and explanations can be designed to improve user experience with robot failures through two user studies. In our first, online study ($n=162$), users expressed increased trust, satisfaction, and utility with the robot performing automated repair and explanations. However, we also identified risk factors -- safety, privacy, and complexity -- that require adaptive repair strategies. The second, in-person study ($n=24$) elucidated distinct repair and explanation strategies depending on the level of risk severity and type. Using a design-based approach, we explore automated repair with explanations as a solution for robots to handle conflicts and failures, complemented by adaptive strategies for risk factors. Finally, we discuss the implications of incorporating such strategies into robot designs to achieve seamless operation among changing user needs and environments.
The AI-DEC: A Card-based Design Method for User-centered AI Explanations
May 26, 2024



Increasing evidence suggests that many deployed AI systems do not sufficiently support end-user interaction and information needs. Engaging end-users in the design of these systems can reveal user needs and expectations, yet effective ways of engaging end-users in the AI explanation design remain under-explored. To address this gap, we developed a design method, called AI-DEC, that defines four dimensions of AI explanations that are critical for the integration of AI systems -- communication content, modality, frequency, and direction -- and offers design examples for end-users to design AI explanations that meet their needs. We evaluated this method through co-design sessions with workers in healthcare, finance, and management industries who regularly use AI systems in their daily work. Findings indicate that the AI-DEC effectively supported workers in designing explanations that accommodated diverse levels of performance and autonomy needs, which varied depending on the AI system's workplace role and worker values. We discuss the implications of using the AI-DEC for the user-centered design of AI explanations in real-world systems.
Design, Development, and Deployment of Context-Adaptive AI Systems for Enhanced End-User Adoption
Jan 24, 2024My research centers on the development of context-adaptive AI systems to improve end-user adoption through the integration of technical methods. I deploy these AI systems across various interaction modalities, including user interfaces and embodied agents like robots, to expand their practical applicability. My research unfolds in three key stages: design, development, and deployment. In the design phase, user-centered approaches were used to understand user experiences with AI systems and create design tools for user participation in crafting AI explanations. In the ongoing development stage, a safety-guaranteed AI system for a robot agent was created to automatically provide adaptive solutions and explanations for unforeseen scenarios. The next steps will involve the implementation and evaluation of context-adaptive AI systems in various interaction forms. I seek to prioritize human needs in technology development, creating AI systems that tangibly benefit end-users in real-world applications and enhance interaction experiences.
* Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, 5 pages
The Unboxing Experience: Exploration and Design of Initial Interactions Between Children and Social Robots
Feb 17, 2022



Social robots are increasingly introduced into children's lives as educational and social companions, yet little is known about how these products might best be introduced to their environments. The emergence of the "unboxing" phenomenon in media suggests that introduction is key to technology adoption where initial impressions are made. To better understand this phenomenon toward designing a positive unboxing experience in the context of social robots for children, we conducted three field studies with families of children aged 8 to 13: (1) an exploratory free-play activity ($n=12$); (2) a co-design session ($n=11$) that informed the development of a prototype box and a curated unboxing experience; and (3) a user study ($n=9$) that evaluated children's experiences. Our findings suggest the unboxing experience of social robots can be improved through the design of a creative aesthetic experience that engages the child socially to guide initial interactions and foster a positive child-robot relationship.