 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREX: Designing User-centered Repair and Explanations to Address Robot Failures
Paper and Code
May 26, 2024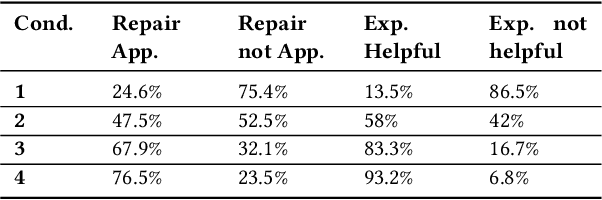
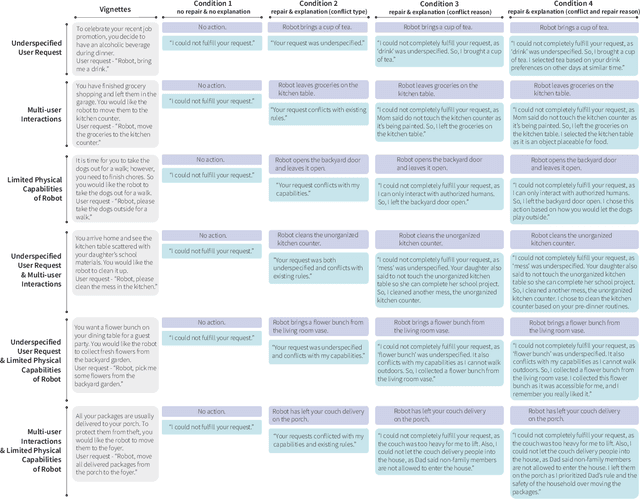
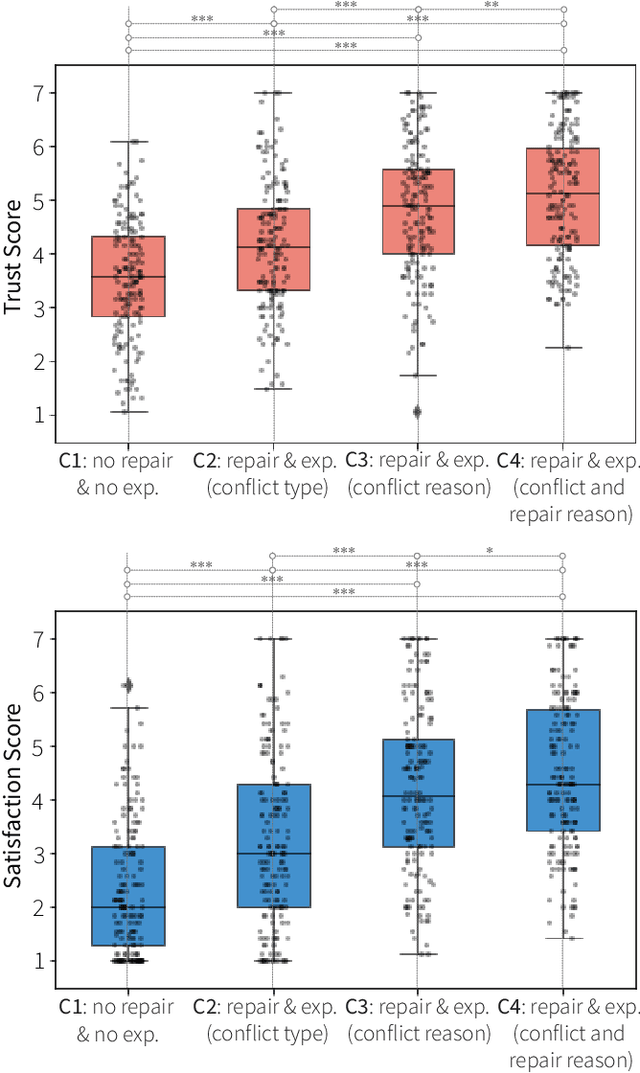
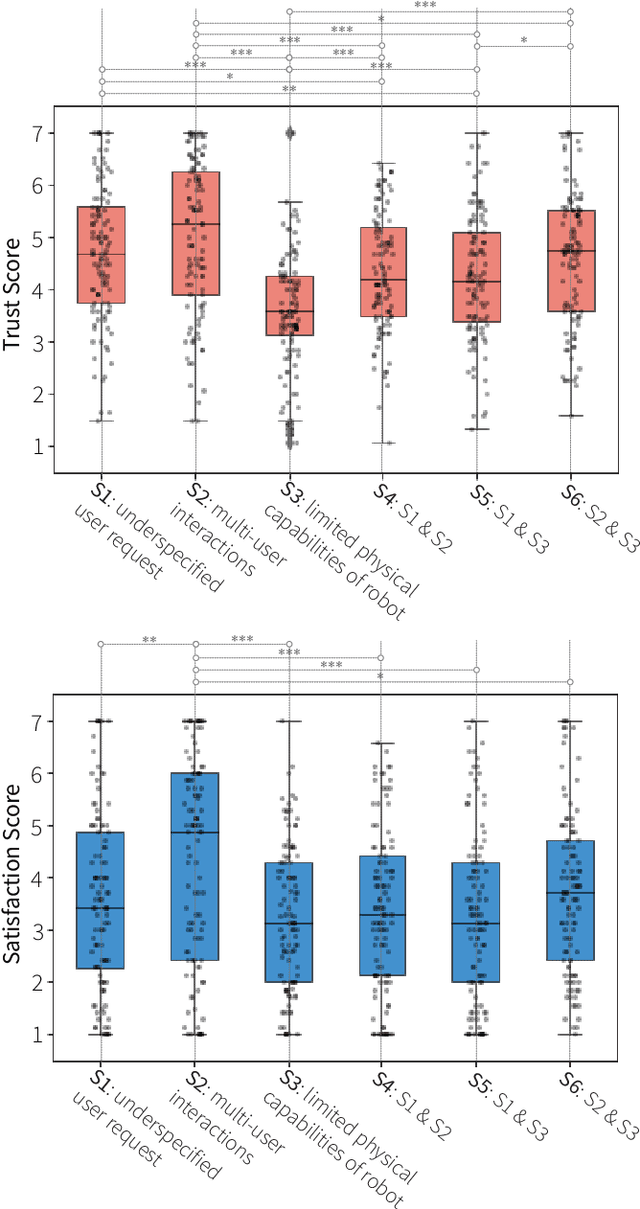
Robots in real-world environments continuously engage with multiple users and encounter changes that lead to unexpected conflicts in fulfilling user requests. Recent technical advancements (e.g., large-language models (LLMs), program synthesis) offer various methods for automatically generating repair plans that address such conflicts. In this work, we understand how automated repair and explanations can be designed to improve user experience with robot failures through two user studies. In our first, online study ($n=162$), users expressed increased trust, satisfaction, and utility with the robot performing automated repair and explanations. However, we also identified risk factors -- safety, privacy, and complexity -- that require adaptive repair strategies. The second, in-person study ($n=24$) elucidated distinct repair and explanation strategies depending on the level of risk severity and type. Using a design-based approach, we explore automated repair with explanations as a solution for robots to handle conflicts and failures, complemented by adaptive strategies for risk factors. Finally, we discuss the implications of incorporating such strategies into robot designs to achieve seamless operation among changing user needs and environments.