 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Informed Decisions: Supporting Cobot Integration Considering Business and Worker Preferences
Jan 10, 2024Robots are ubiquitous in small-to-large-scale manufacturers. While collaborative robots (cobots) have significant potential in these settings due to their flexibility and ease of use, proper integration is critical to realize their full potential. Specifically, cobots need to be integrated in ways that utilize their strengths, improve manufacturing performance, and facilitate use in concert with human workers. Effective integration requires careful consideration and the knowledge of roboticists, manufacturing engineers, and business administrators. We propose an approach involving the stages of planning, analysis, development, and presentation, to inform manufacturers about cobot integration within their facilities prior to the integration process. We contextualize our approach in a case study with an SME collaborator and discuss insights learned.
CONFIDANT: A Privacy Controller for Social Robots
Jan 08, 2022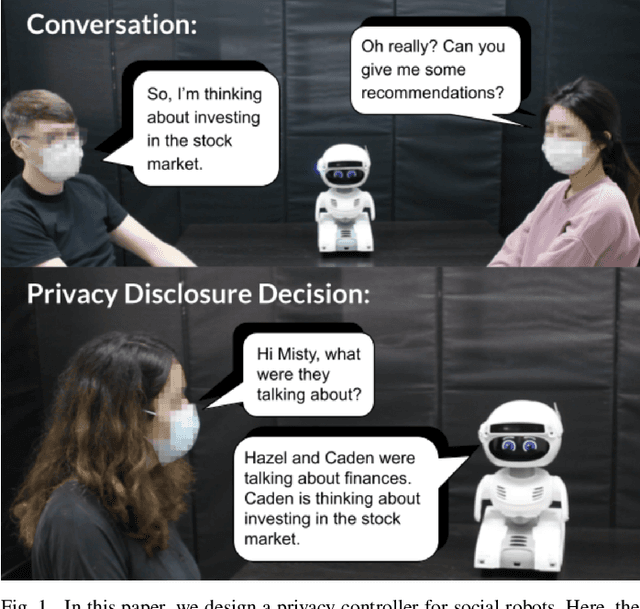
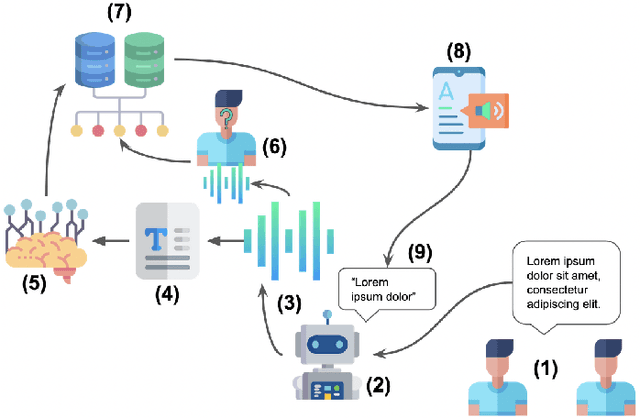
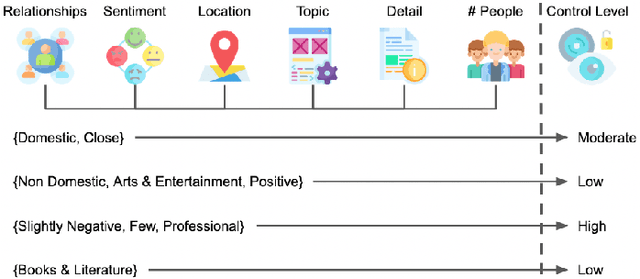
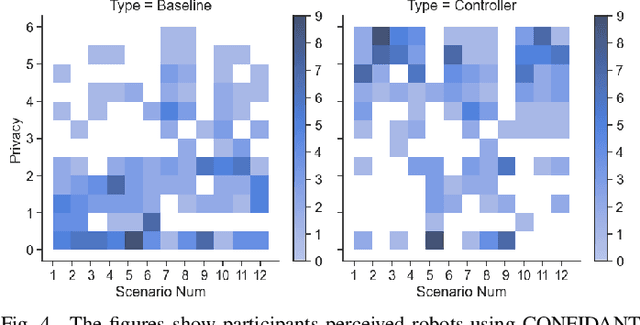
As social robots become increasingly prevalent in day-to-day environments, they will participate in conversations and appropriately manage the information shared with them. However, little is known about how robots might appropriately discern the sensitivity of information, which has major implications for human-robot trust. As a first step to address a part of this issue, we designed a privacy controller, CONFIDANT, for conversational social robots, capable of using contextual metadata (e.g., sentiment, relationships, topic) from conversations to model privacy boundaries. Afterwards, we conducted two crowdsourced user studies. The first study (n=174) focused on whether a variety of human-human interaction scenarios were perceived as either private/sensitive or non-private/non-sensitive. The findings from our first study were used to generate association rules. Our second study (n=95) evaluated the effectiveness and accuracy of the privacy controller in human-robot interaction scenarios by comparing a robot that used our privacy controller against a baseline robot with no privacy controls. Our results demonstrate that the robot with the privacy controller outperforms the robot without the privacy controller in privacy-awareness, trustworthiness, and social-awareness. We conclude that the integration of privacy controllers in authentic human-robot conversations can allow for more trustworthy robots. This initial privacy controller will serve as a foundation for more complex solutions.