 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlug-and-Play SLAM: A Unified SLAM Architecture for Modularity and Ease of Use
Mar 02, 2020
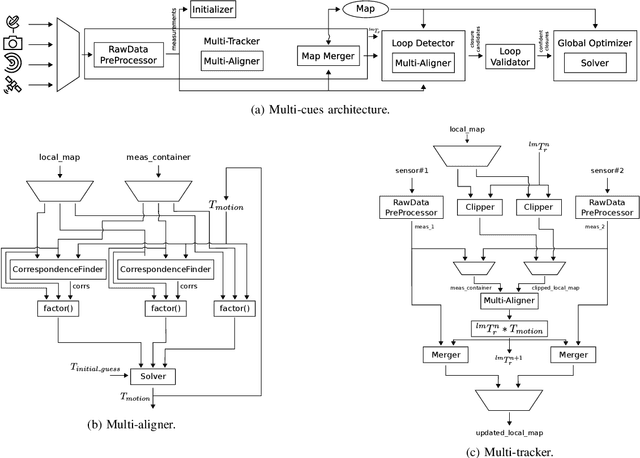
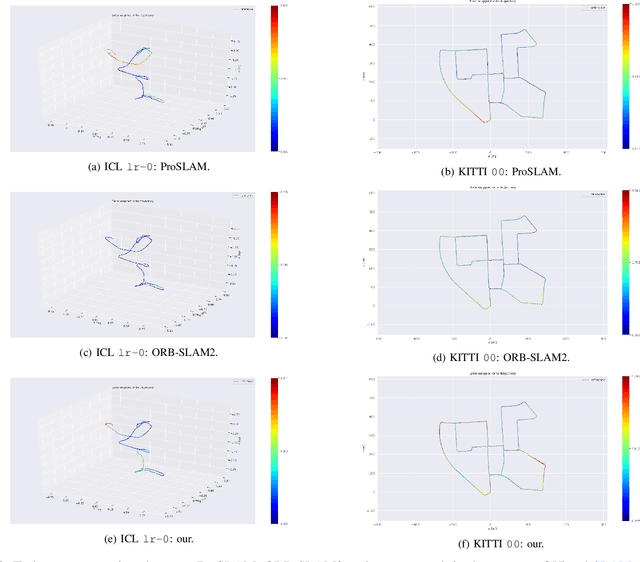
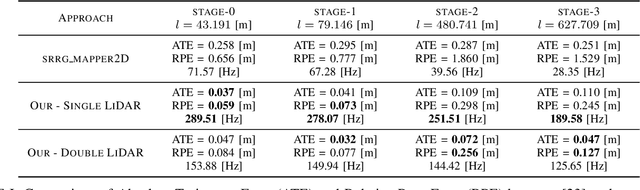
Nowadays, SLAM (Simultaneous Localization and Mapping) is considered by the Robotics community to be a mature field. Currently, there are many open-source systems that are able to deliver fast and accurate estimation in typical real-world scenarios. Still, all these systems often provide an ad-hoc implementation that entailed to predefined sensor configurations. In this work, we tackle this issue, proposing a novel SLAM architecture specifically designed to address heterogeneous sensors' configuration and to standardize SLAM solutions. Thanks to its modularity and to specific design patterns, the presented architecture is easy to extend, enhancing code reuse and efficiency. Finally, adopting our solution, we conducted comparative experiments for a variety of sensor configurations, showing competitive results that confirm state-of-the-art performance.
Least Squares Optimization: from Theory to Practice
Feb 26, 2020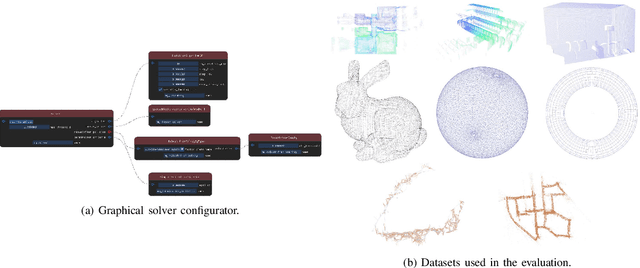
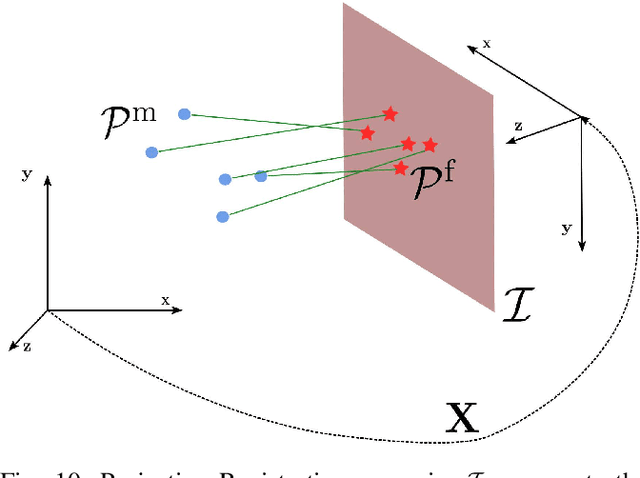
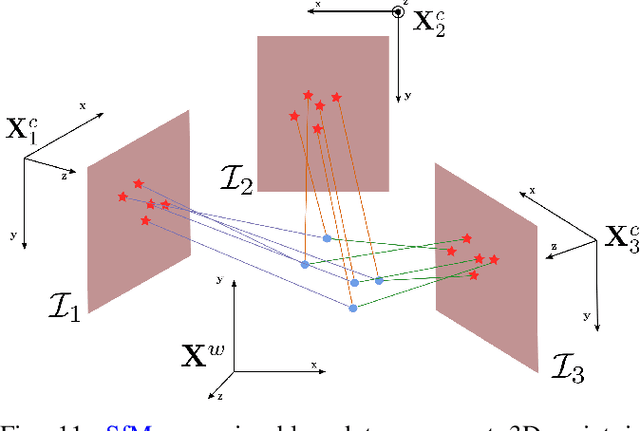
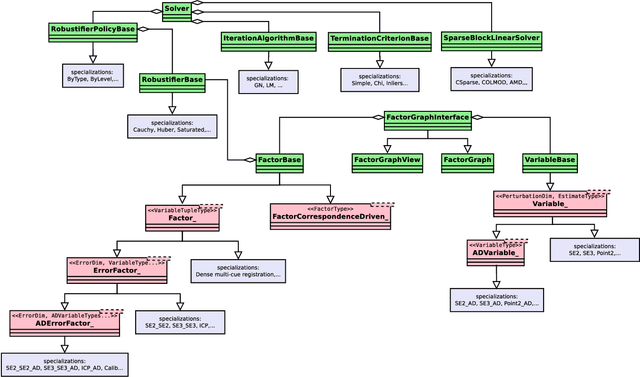
Nowadays, Non-Linear Least-Squares embodies the foundation of many Robotics and Computer Vision systems. The research community deeply investigated this topic in the last years, and this resulted in the development of several open-source solvers to approach constantly increasing classes of problems. In this work, we propose a unified methodology to design and develop efficient Least-Squares Optimization algorithms, focusing on the structures and patterns of each specific domain. Furthermore, we present a novel open-source optimization system, that addresses transparently problems with a different structure and designed to be easy to extend. The system is written in modern C++ and can run efficiently on embedded systems. Source code: https://srrg.gitlab.io/srrg2-solver.html. We validated our approach by conducting comparative experiments on several problems using standard datasets. The results show that our system achieves state-of-the-art performances in all tested scenarios.
Non-Linear Model Predictive Control with Adaptive Time-Mesh Refinement
Mar 28, 2018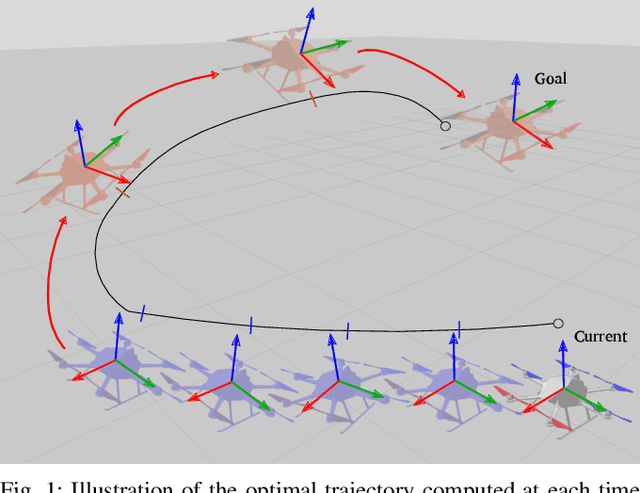
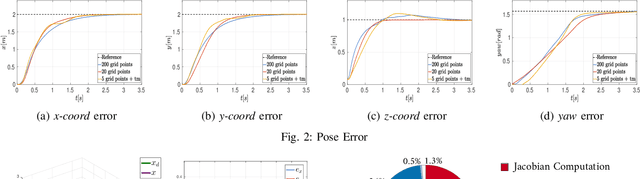
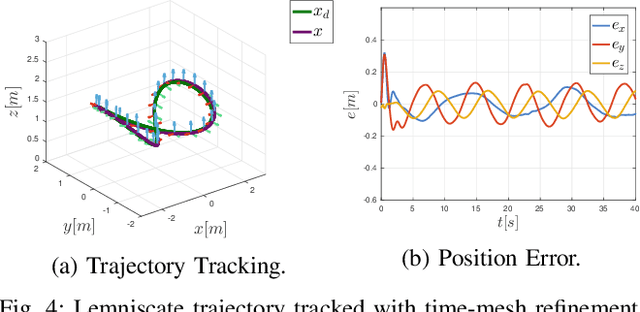
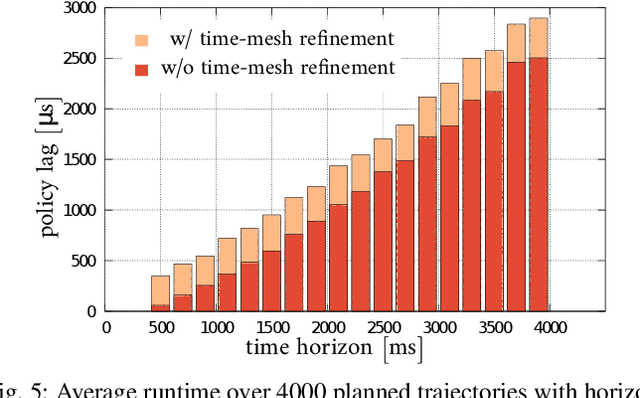
In this paper, we present a novel solution for real-time, Non-Linear Model Predictive Control (NMPC) exploiting a time-mesh refinement strategy. The proposed controller formulates the Optimal Control Problem (OCP) in terms of flat outputs over an adaptive lattice. In common approximated OCP solutions, the number of discretization points composing the lattice represents a critical upper bound for real-time applications. The proposed NMPC-based technique refines the initially uniform time horizon by adding time steps with a sampling criterion that aims to reduce the discretization error. This enables a higher accuracy in the initial part of the receding horizon, which is more relevant to NMPC, while keeping bounded the number of discretization points. By combining this feature with an efficient Least Square formulation, our solver is also extremely time-efficient, generating trajectories of multiple seconds within only a few milliseconds. The performance of the proposed approach has been validated in a high fidelity simulation environment, by using an UAV platform. We also released our implementation as open source C++ code.
A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration
Sep 13, 2017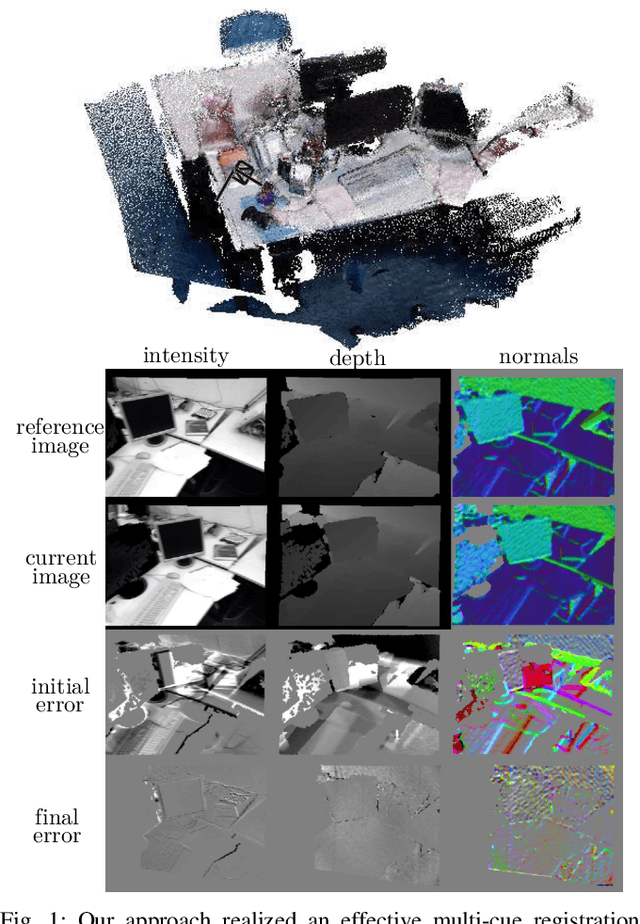
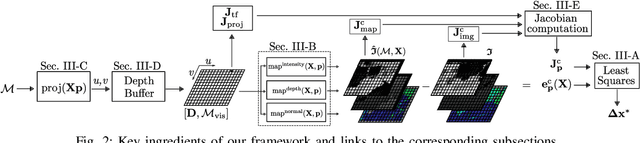
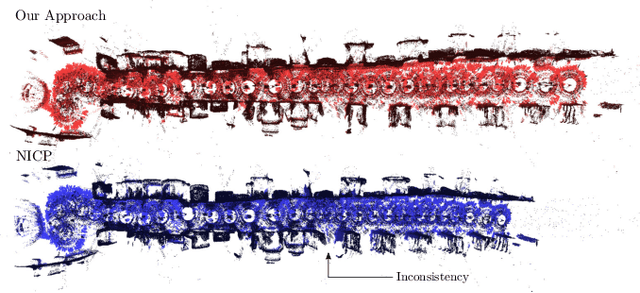
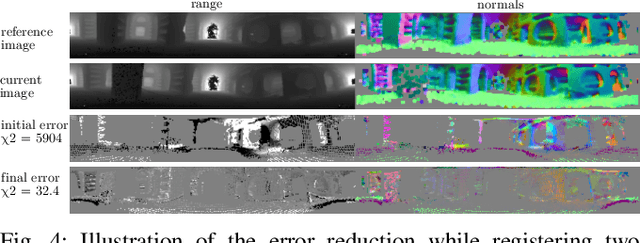
The ability to build maps is a key functionality for the majority of mobile robots. A central ingredient to most mapping systems is the registration or alignment of the recorded sensor data. In this paper, we present a general methodology for photometric registration that can deal with multiple different cues. We provide examples for registering RGBD as well as 3D LIDAR data. In contrast to popular point cloud registration approaches such as ICP our method does not rely on explicit data association and exploits multiple modalities such as raw range and image data streams. Color, depth, and normal information are handled in an uniform manner and the registration is obtained by minimizing the pixel-wise difference between two multi-channel images. We developed a flexible and general framework and implemented our approach inside that framework. We also released our implementation as open source C++ code. The experiments show that our approach allows for an accurate registration of the sensor data without requiring an explicit data association or model-specific adaptations to datasets or sensors. Our approach exploits the different cues in a natural and consistent way and the registration can be done at framerate for a typical range or imaging sensor.