 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Framework for Flexible Multi-Cue Photometric Point Cloud Registration
Paper and Code
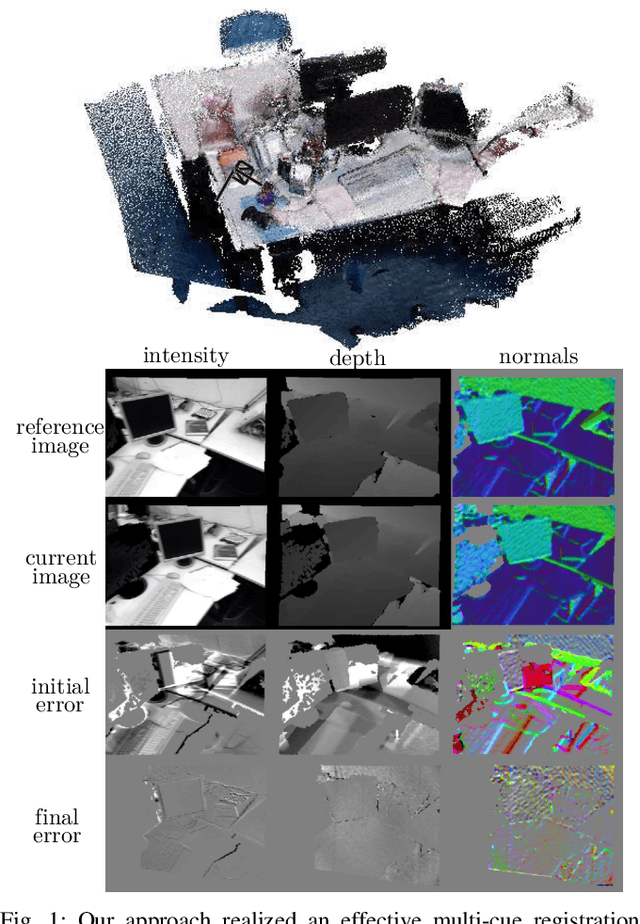
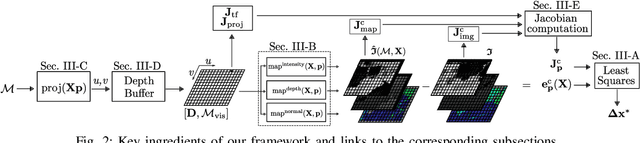
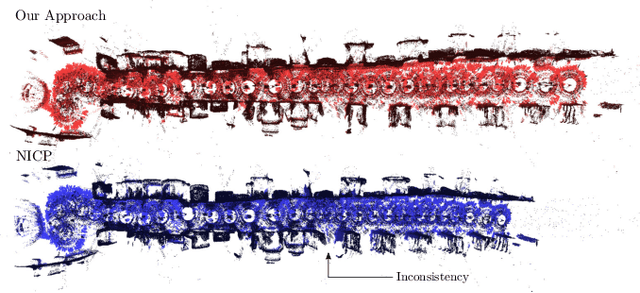
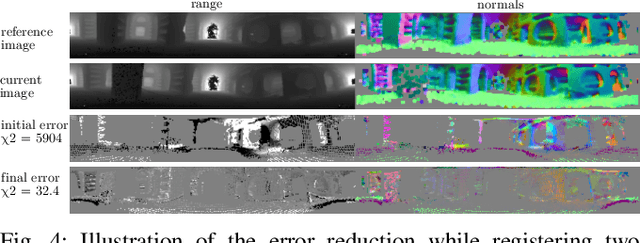
The ability to build maps is a key functionality for the majority of mobile robots. A central ingredient to most mapping systems is the registration or alignment of the recorded sensor data. In this paper, we present a general methodology for photometric registration that can deal with multiple different cues. We provide examples for registering RGBD as well as 3D LIDAR data. In contrast to popular point cloud registration approaches such as ICP our method does not rely on explicit data association and exploits multiple modalities such as raw range and image data streams. Color, depth, and normal information are handled in an uniform manner and the registration is obtained by minimizing the pixel-wise difference between two multi-channel images. We developed a flexible and general framework and implemented our approach inside that framework. We also released our implementation as open source C++ code. The experiments show that our approach allows for an accurate registration of the sensor data without requiring an explicit data association or model-specific adaptations to datasets or sensors. Our approach exploits the different cues in a natural and consistent way and the registration can be done at framerate for a typical range or imaging sensor.