 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlug-and-Play SLAM: A Unified SLAM Architecture for Modularity and Ease of Use
Mar 02, 2020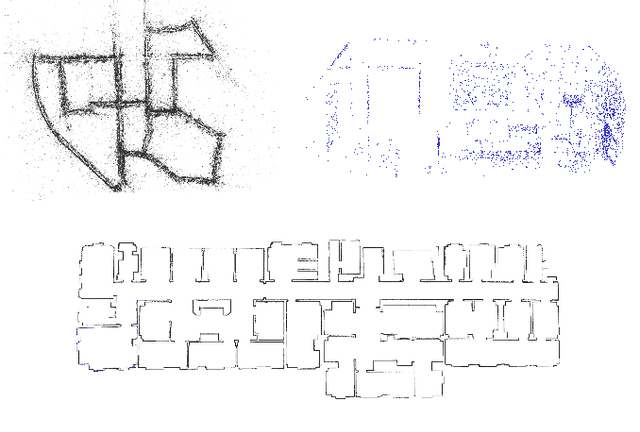
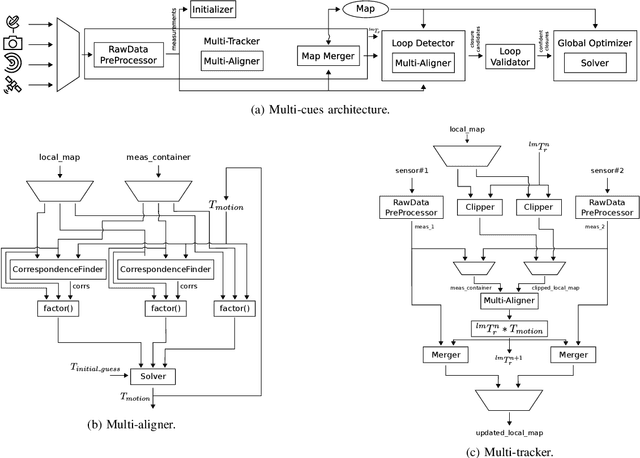
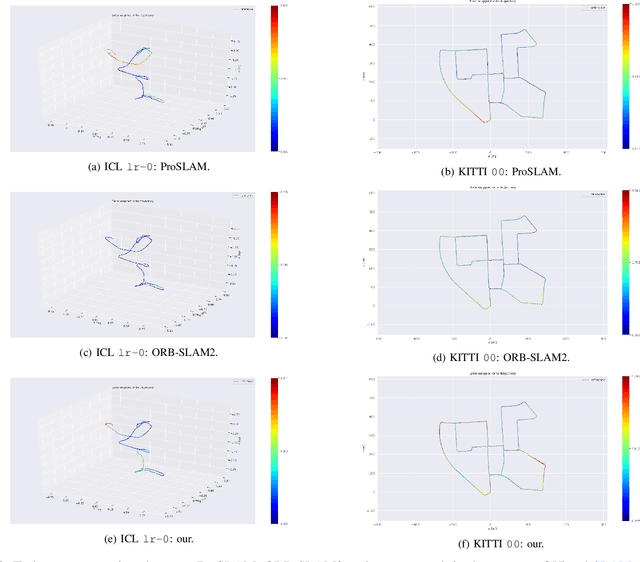
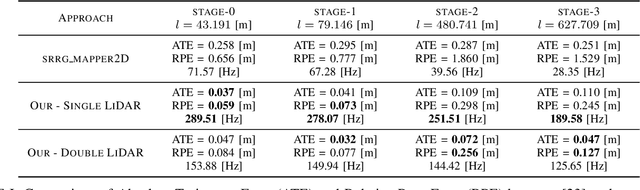
Nowadays, SLAM (Simultaneous Localization and Mapping) is considered by the Robotics community to be a mature field. Currently, there are many open-source systems that are able to deliver fast and accurate estimation in typical real-world scenarios. Still, all these systems often provide an ad-hoc implementation that entailed to predefined sensor configurations. In this work, we tackle this issue, proposing a novel SLAM architecture specifically designed to address heterogeneous sensors' configuration and to standardize SLAM solutions. Thanks to its modularity and to specific design patterns, the presented architecture is easy to extend, enhancing code reuse and efficiency. Finally, adopting our solution, we conducted comparative experiments for a variety of sensor configurations, showing competitive results that confirm state-of-the-art performance.
Least Squares Optimization: from Theory to Practice
Feb 26, 2020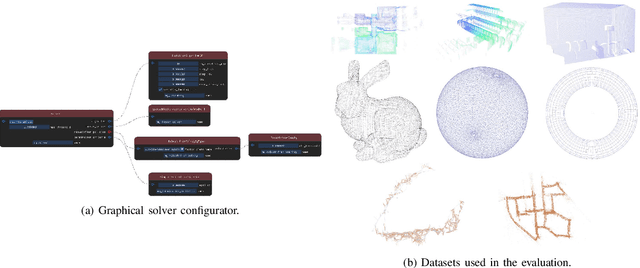
Nowadays, Non-Linear Least-Squares embodies the foundation of many Robotics and Computer Vision systems. The research community deeply investigated this topic in the last years, and this resulted in the development of several open-source solvers to approach constantly increasing classes of problems. In this work, we propose a unified methodology to design and develop efficient Least-Squares Optimization algorithms, focusing on the structures and patterns of each specific domain. Furthermore, we present a novel open-source optimization system, that addresses transparently problems with a different structure and designed to be easy to extend. The system is written in modern C++ and can run efficiently on embedded systems. Source code: https://srrg.gitlab.io/srrg2-solver.html. We validated our approach by conducting comparative experiments on several problems using standard datasets. The results show that our system achieves state-of-the-art performances in all tested scenarios.
Adding Cues to Binary Feature Descriptors for Visual Place Recognition
Sep 18, 2018



In this paper we propose an approach to embed continuous and selector cues in binary feature descriptors used for visual place recognition. The embedding is achieved by extending each feature descriptor with a binary string that encodes a cue and supports the Hamming distance metric. Augmenting the descriptors in such a way has the advantage of being transparent to the procedure used to compare them. We present two concrete applications of our methodology, demonstrating the two considered types of cues. In addition to that, we conducted on these applications a broad quantitative and comparative evaluation covering five benchmark datasets and several state-of-the-art image retrieval approaches in combination with various binary descriptor types.
HBST: A Hamming Distance embedding Binary Search Tree for Visual Place Recognition
Feb 28, 2018



Reliable and efficient Visual Place Recognition is a major building block of modern SLAM systems. Leveraging on our prior work, in this paper we present a Hamming Distance embedding Binary Search Tree (HBST) approach for binary Descriptor Matching and Image Retrieval. HBST allows for descriptor Search and Insertion in logarithmic time by exploiting particular properties of binary Feature descriptors. We support the idea behind our search structure with a thorough analysis on the exploited descriptor properties and their effects on completeness and complexity of search and insertion. To validate our claims we conducted comparative experiments for HBST and several state-of-the-art methods on a broad range of publicly available datasets. HBST is available as a compact open-source C++ header-only library.
* Submitted to IEEE Robotics and Automation Letters (RA-L) 2018 with International Conference on Intelligent Robots and Systems (IROS) 2018 option, 8 pages, 10 figures
ProSLAM: Graph SLAM from a Programmer's Perspective
Sep 13, 2017

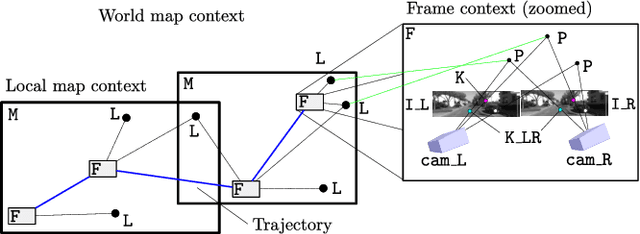
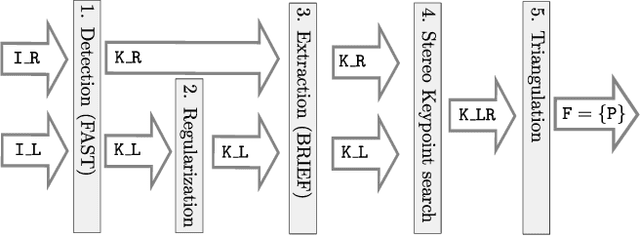
In this paper we present ProSLAM, a lightweight stereo visual SLAM system designed with simplicity in mind. Our work stems from the experience gathered by the authors while teaching SLAM to students and aims at providing a highly modular system that can be easily implemented and understood. Rather than focusing on the well known mathematical aspects of Stereo Visual SLAM, in this work we highlight the data structures and the algorithmic aspects that one needs to tackle during the design of such a system. We implemented ProSLAM using the C++ programming language in combination with a minimal set of well known used external libraries. In addition to an open source implementation, we provide several code snippets that address the core aspects of our approach directly in this paper. The results of a thorough validation performed on standard benchmark datasets show that our approach achieves accuracy comparable to state of the art methods, while requiring substantially less computational resources.