 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSinkhorn doubly stochastic attention rank decay analysis
Apr 09, 2026The self-attention mechanism is central to the success of Transformer architectures. However, standard row-stochastic attention has been shown to suffer from significant signal degradation across layers. In particular, it can induce rank collapse, resulting in increasingly uniform token representations, as well as entropy collapse, characterized by highly concentrated attention distributions. Recent work has highlighted the benefits of doubly stochastic attention as a form of entropy regularization, promoting a more balanced attention distribution and leading to improved empirical performance. In this paper, we study rank collapse across network depth and show that doubly stochastic attention matrices normalized with Sinkhorn algorithm preserve rank more effectively than standard Softmax row-stochastic ones. As previously shown for Softmax, skip connections are crucial to mitigate rank collapse. We empirically validate this phenomenon on both sentiment analysis and image classification tasks. Moreover, we derive a theoretical bound for the pure self-attention rank decay when using Sinkhorn normalization and find that rank decays to one doubly exponentially with depth, a phenomenon that has already been shown for Softmax.
On the Topology of Neural Network Superlevel Sets
Mar 03, 2026We show that neural networks with activations satisfying a Riccati-type ordinary differential equation condition, an assumption arising in recent universal approximation results in the uniform topology, produce Pfaffian outputs on analytic domains with format controlled only by the architecture. Consequently, superlevel sets, as well as Lie bracket rank drop loci for neural network parameterized vector fields, admit architecture-only bounds on topological complexity, in particular on total Betti numbers, uniformly over all weights.
Localmax dynamics for attention in transformers and its asymptotic behavior
Sep 19, 2025We introduce a new discrete-time attention model, termed the localmax dynamics, which interpolates between the classic softmax dynamics and the hardmax dynamics, where only the tokens that maximize the influence toward a given token have a positive weight. As in hardmax, uniform weights are determined by a parameter controlling neighbor influence, but the key extension lies in relaxing neighborhood interactions through an alignment-sensitivity parameter, which allows controlled deviations from pure hardmax behavior. As we prove, while the convex hull of the token states still converges to a convex polytope, its structure can no longer be fully described by a maximal alignment set, prompting the introduction of quiescent sets to capture the invariant behavior of tokens near vertices. We show that these sets play a key role in understanding the asymptotic behavior of the system, even under time-varying alignment sensitivity parameters. We further show that localmax dynamics does not exhibit finite-time convergence and provide results for vanishing, nonzero, time-varying alignment-sensitivity parameters, recovering the limiting behavior of hardmax as a by-product. Finally, we adapt Lyapunov-based methods from classical opinion dynamics, highlighting their limitations in the asymmetric setting of localmax interactions and outlining directions for future research.
Neural Lyapunov Function Approximation with Self-Supervised Reinforcement Learning
Mar 19, 2025Control Lyapunov functions are traditionally used to design a controller which ensures convergence to a desired state, yet deriving these functions for nonlinear systems remains a complex challenge. This paper presents a novel, sample-efficient method for neural approximation of nonlinear Lyapunov functions, leveraging self-supervised Reinforcement Learning (RL) to enhance training data generation, particularly for inaccurately represented regions of the state space. The proposed approach employs a data-driven World Model to train Lyapunov functions from off-policy trajectories. The method is validated on both standard and goal-conditioned robotic tasks, demonstrating faster convergence and higher approximation accuracy compared to the state-of-the-art neural Lyapunov approximation baseline. The code is available at: https://github.com/CAV-Research-Lab/SACLA.git
Sample Complexity of Linear Quadratic Regulator Without Initial Stability
Feb 20, 2025

Inspired by REINFORCE, we introduce a novel receding-horizon algorithm for the Linear Quadratic Regulator (LQR) problem with unknown parameters. Unlike prior methods, our algorithm avoids reliance on two-point gradient estimates while maintaining the same order of sample complexity. Furthermore, it eliminates the restrictive requirement of starting with a stable initial policy, broadening its applicability. Beyond these improvements, we introduce a refined analysis of error propagation through the contraction of the Riemannian distance over the Riccati operator. This refinement leads to a better sample complexity and ensures improved convergence guarantees. Numerical simulations validate the theoretical results, demonstrating the method's practical feasibility and performance in realistic scenarios.
Sample Complexity of the Linear Quadratic Regulator: A Reinforcement Learning Lens
Apr 18, 2024

We provide the first known algorithm that provably achieves $\varepsilon$-optimality within $\widetilde{\mathcal{O}}(1/\varepsilon)$ function evaluations for the discounted discrete-time LQR problem with unknown parameters, without relying on two-point gradient estimates. These estimates are known to be unrealistic in many settings, as they depend on using the exact same initialization, which is to be selected randomly, for two different policies. Our results substantially improve upon the existing literature outside the realm of two-point gradient estimates, which either leads to $\widetilde{\mathcal{O}}(1/\varepsilon^2)$ rates or heavily relies on stability assumptions.
A Unifying Generator Loss Function for Generative Adversarial Networks
Aug 14, 2023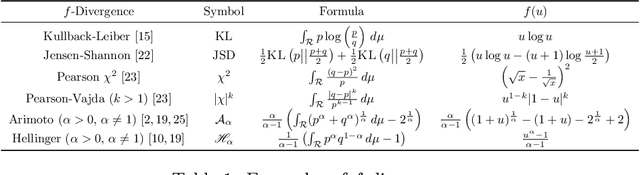
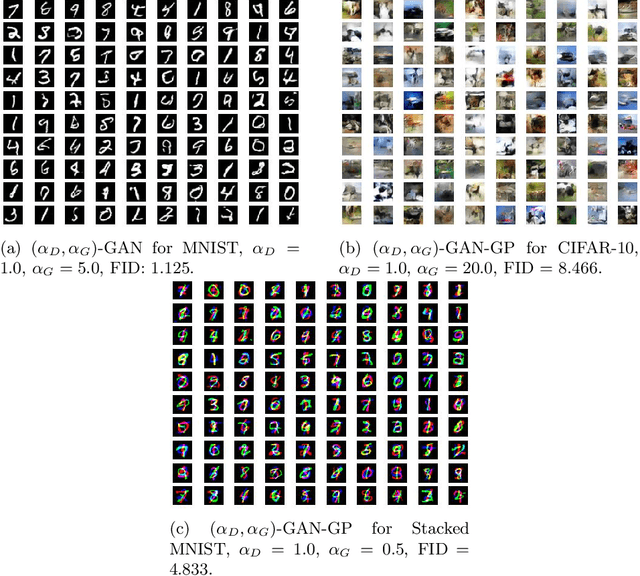
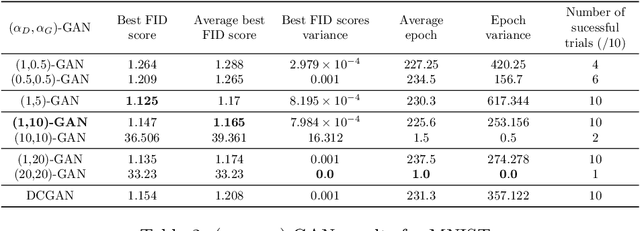
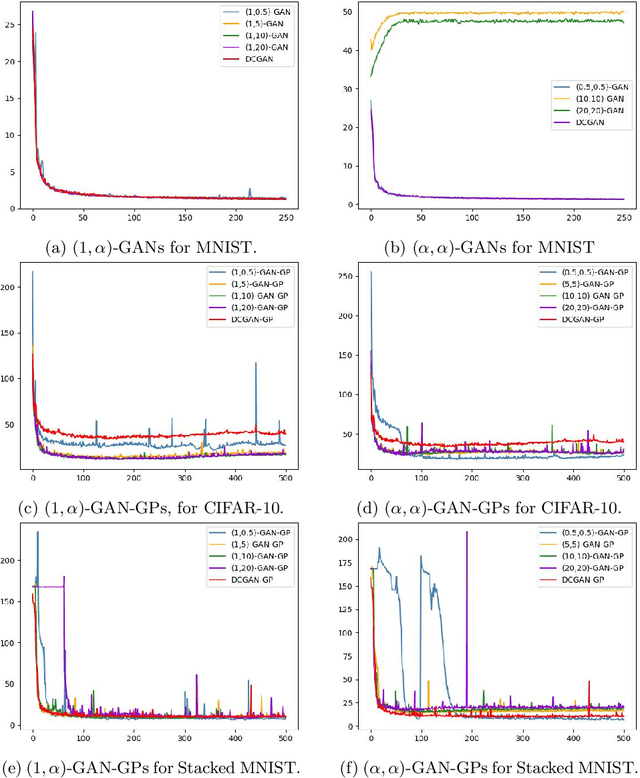
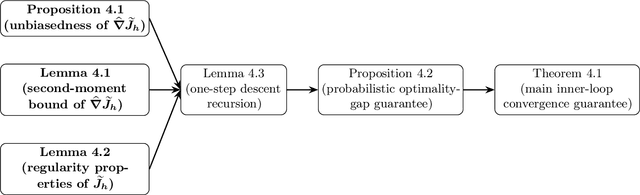
A unifying $\alpha$-parametrized generator loss function is introduced for a dual-objective generative adversarial network (GAN), which uses a canonical (or classical) discriminator loss function such as the one in the original GAN (VanillaGAN) system. The generator loss function is based on a symmetric class probability estimation type function, $\mathcal{L}_\alpha$, and the resulting GAN system is termed $\mathcal{L}_\alpha$-GAN. Under an optimal discriminator, it is shown that the generator's optimization problem consists of minimizing a Jensen-$f_\alpha$-divergence, a natural generalization of the Jensen-Shannon divergence, where $f_\alpha$ is a convex function expressed in terms of the loss function $\mathcal{L}_\alpha$. It is also demonstrated that this $\mathcal{L}_\alpha$-GAN problem recovers as special cases a number of GAN problems in the literature, including VanillaGAN, Least Squares GAN (LSGAN), Least $k$th order GAN (L$k$GAN) and the recently introduced $(\alpha_D,\alpha_G)$-GAN with $\alpha_D=1$. Finally, experimental results are conducted on three datasets, MNIST, CIFAR-10, and Stacked MNIST to illustrate the performance of various examples of the $\mathcal{L}_\alpha$-GAN system.
Achieving Utility, Fairness, and Compactness via Tunable Information Bottleneck Measures
Jun 20, 2022
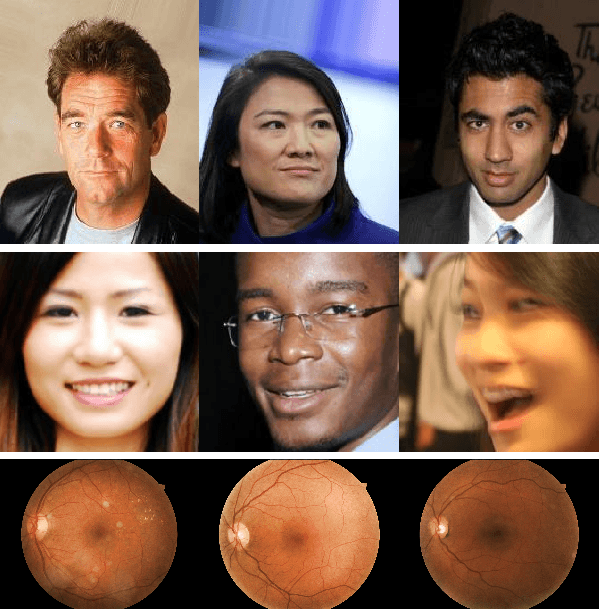
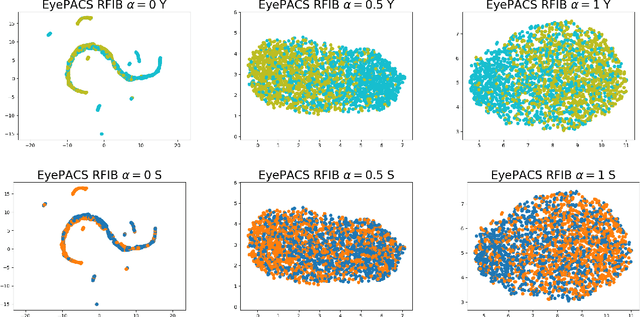
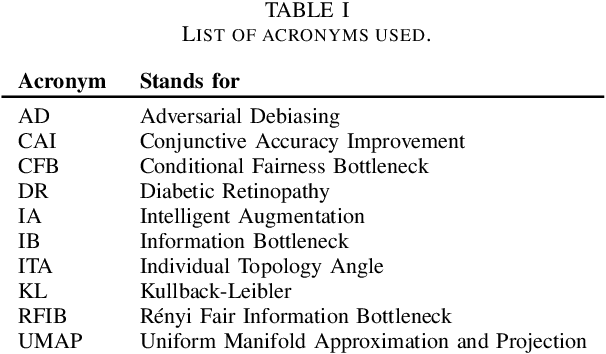
Designing machine learning algorithms that are accurate yet fair, not discriminating based on any sensitive attribute, is of paramount importance for society to accept AI for critical applications. In this article, we propose a novel fair representation learning method termed the R\'enyi Fair Information Bottleneck Method (RFIB) which incorporates constraints for utility, fairness, and compactness of representation, and apply it to image classification. A key attribute of our approach is that we consider - in contrast to most prior work - both demographic parity and equalized odds as fairness constraints, allowing for a more nuanced satisfaction of both criteria. Leveraging a variational approach, we show that our objectives yield a loss function involving classical Information Bottleneck (IB) measures and establish an upper bound in terms of the R\'enyi divergence of order $\alpha$ on the mutual information IB term measuring compactness between the input and its encoded embedding. Experimenting on three different image datasets (EyePACS, CelebA, and FairFace), we study the influence of the $\alpha$ parameter as well as two other tunable IB parameters on achieving utility/fairness trade-off goals, and show that the $\alpha$ parameter gives an additional degree of freedom that can be used to control the compactness of the representation. We evaluate the performance of our method using various utility, fairness, and compound utility/fairness metrics, showing that RFIB outperforms current state-of-the-art approaches.
Neural ODE Control for Trajectory Approximation of Continuity Equation
May 18, 2022We consider the controllability problem for the continuity equation, corresponding to neural ordinary differential equations (ODEs), which describes how a probability measure is pushedforward by the flow. We show that the controlled continuity equation has very strong controllability properties. Particularly, a given solution of the continuity equation corresponding to a bounded Lipschitz vector field defines a trajectory on the set of probability measures. For this trajectory, we show that there exist piecewise constant training weights for a neural ODE such that the solution of the continuity equation corresponding to the neural ODE is arbitrarily close to it. As a corollary to this result, we establish that the continuity equation of the neural ODE is approximately controllable on the set of compactly supported probability measures that are absolutely continuous with respect to the Lebesgue measure.
Renyi Fair Information Bottleneck for Image Classification
Mar 09, 2022
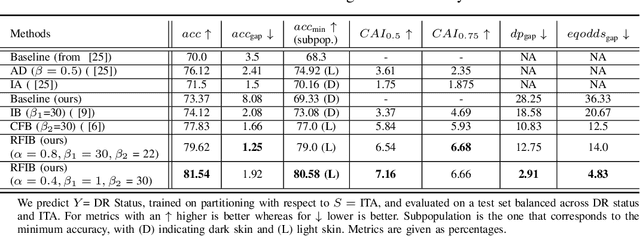
We develop a novel method for ensuring fairness in machine learning which we term as the Renyi Fair Information Bottleneck (RFIB). We consider two different fairness constraints - demographic parity and equalized odds - for learning fair representations and derive a loss function via a variational approach that uses Renyi's divergence with its tunable parameter $\alpha$ and that takes into account the triple constraints of utility, fairness, and compactness of representation. We then evaluate the performance of our method for image classification using the EyePACS medical imaging dataset, showing it outperforms competing state of the art techniques with performance measured using a variety of compound utility/fairness metrics, including accuracy gap and Rawls' minimal accuracy.