 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-World+: An Improved, Standardized, RL Benchmark
May 16, 2025Meta-World is widely used for evaluating multi-task and meta-reinforcement learning agents, which are challenged to master diverse skills simultaneously. Since its introduction however, there have been numerous undocumented changes which inhibit a fair comparison of algorithms. This work strives to disambiguate these results from the literature, while also leveraging the past versions of Meta-World to provide insights into multi-task and meta-reinforcement learning benchmark design. Through this process we release a new open-source version of Meta-World (https://github.com/Farama-Foundation/Metaworld/) that has full reproducibility of past results, is more technically ergonomic, and gives users more control over the tasks that are included in a task set.
Neural Lyapunov Function Approximation with Self-Supervised Reinforcement Learning
Mar 19, 2025Control Lyapunov functions are traditionally used to design a controller which ensures convergence to a desired state, yet deriving these functions for nonlinear systems remains a complex challenge. This paper presents a novel, sample-efficient method for neural approximation of nonlinear Lyapunov functions, leveraging self-supervised Reinforcement Learning (RL) to enhance training data generation, particularly for inaccurately represented regions of the state space. The proposed approach employs a data-driven World Model to train Lyapunov functions from off-policy trajectories. The method is validated on both standard and goal-conditioned robotic tasks, demonstrating faster convergence and higher approximation accuracy compared to the state-of-the-art neural Lyapunov approximation baseline. The code is available at: https://github.com/CAV-Research-Lab/SACLA.git
In-Context Ensemble Improves Video-Language Models for Low-Level Workflow Understanding from Human Demonstrations
Sep 26, 2024



A Standard Operating Procedure (SOP) defines a low-level, step-by-step written guide for a business software workflow based on a video demonstration. SOPs are a crucial step toward automating end-to-end software workflows. Manually creating SOPs can be time-consuming. Recent advancements in large video-language models offer the potential for automating SOP generation by analyzing recordings of human demonstrations. However, current large video-language models face challenges with zero-shot SOP generation. We explore in-context learning with video-language models for SOP generation. We report that in-context learning sometimes helps video-language models at SOP generation. We then propose an in-context ensemble learning to further enhance the capabilities of the models in SOP generation.
Adaptive PD Control using Deep Reinforcement Learning for Local-Remote Teleoperation with Stochastic Time Delays
May 26, 2023Local-remote systems allow robots to execute complex tasks in hazardous environments such as space and nuclear power stations. However, establishing accurate positional mapping between local and remote devices can be difficult due to time delays that can compromise system performance and stability. Enhancing the synchronicity and stability of local-remote systems is vital for enabling robots to interact with environments at greater distances and under highly challenging network conditions, including time delays. We introduce an adaptive control method employing reinforcement learning to tackle the time-delayed control problem. By adjusting controller parameters in real-time, this adaptive controller compensates for stochastic delays and improves synchronicity between local and remote robotic manipulators. To improve the adaptive PD controller's performance, we devise a model-based reinforcement learning approach that effectively incorporates multi-step delays into the learning framework. Utilizing this proposed technique, the local-remote system's performance is stabilized for stochastic communication time-delays of up to 290ms. Our results demonstrate that the suggested model-based reinforcement learning method surpasses the Soft-Actor Critic and augmented state Soft-Actor Critic techniques. Access the code at: https://github.com/CAV-Research-Lab/Predictive-Model-Delay-Correction
Prediction Based Decision Making for Autonomous Highway Driving
Sep 05, 2022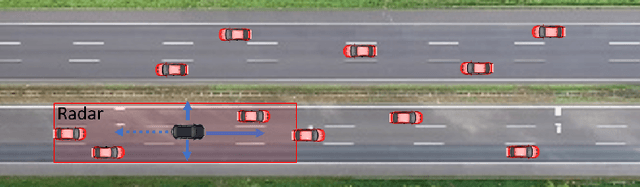
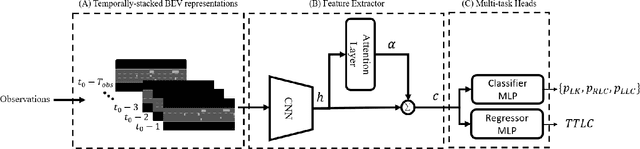
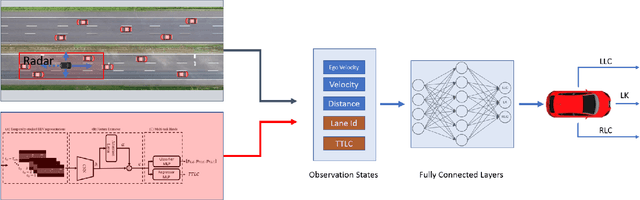

Autonomous driving decision-making is a challenging task due to the inherent complexity and uncertainty in traffic. For example, adjacent vehicles may change their lane or overtake at any time to pass a slow vehicle or to help traffic flow. Anticipating the intention of surrounding vehicles, estimating their future states and integrating them into the decision-making process of an automated vehicle can enhance the reliability of autonomous driving in complex driving scenarios. This paper proposes a Prediction-based Deep Reinforcement Learning (PDRL) decision-making model that considers the manoeuvre intentions of surrounding vehicles in the decision-making process for highway driving. The model is trained using real traffic data and tested in various traffic conditions through a simulation platform. The results show that the proposed PDRL model improves the decision-making performance compared to a Deep Reinforcement Learning (DRL) model by decreasing collision numbers, resulting in safer driving.