 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigher-Order Regularization Learning on Hypergraphs
Oct 30, 2025Higher-Order Hypergraph Learning (HOHL) was recently introduced as a principled alternative to classical hypergraph regularization, enforcing higher-order smoothness via powers of multiscale Laplacians induced by the hypergraph structure. Prior work established the well- and ill-posedness of HOHL through an asymptotic consistency analysis in geometric settings. We extend this theoretical foundation by proving the consistency of a truncated version of HOHL and deriving explicit convergence rates when HOHL is used as a regularizer in fully supervised learning. We further demonstrate its strong empirical performance in active learning and in datasets lacking an underlying geometric structure, highlighting HOHL's versatility and robustness across diverse learning settings.
Latent Diffeomorphic Dynamic Mode Decomposition
May 09, 2025We present Latent Diffeomorphic Dynamic Mode Decomposition (LDDMD), a new data reduction approach for the analysis of non-linear systems that combines the interpretability of Dynamic Mode Decomposition (DMD) with the predictive power of Recurrent Neural Networks (RNNs). Notably, LDDMD maintains simplicity, which enhances interpretability, while effectively modeling and learning complex non-linear systems with memory, enabling accurate predictions. This is exemplified by its successful application in streamflow prediction.
Neural ODE Control for Trajectory Approximation of Continuity Equation
May 18, 2022We consider the controllability problem for the continuity equation, corresponding to neural ordinary differential equations (ODEs), which describes how a probability measure is pushedforward by the flow. We show that the controlled continuity equation has very strong controllability properties. Particularly, a given solution of the continuity equation corresponding to a bounded Lipschitz vector field defines a trajectory on the set of probability measures. For this trajectory, we show that there exist piecewise constant training weights for a neural ODE such that the solution of the continuity equation corresponding to the neural ODE is arbitrarily close to it. As a corollary to this result, we establish that the continuity equation of the neural ODE is approximately controllable on the set of compactly supported probability measures that are absolutely continuous with respect to the Lebesgue measure.
Who killed Lilly Kane? A case study in applying knowledge graphs to crime fiction
Nov 24, 2020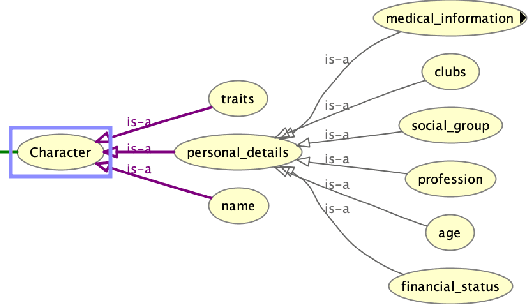
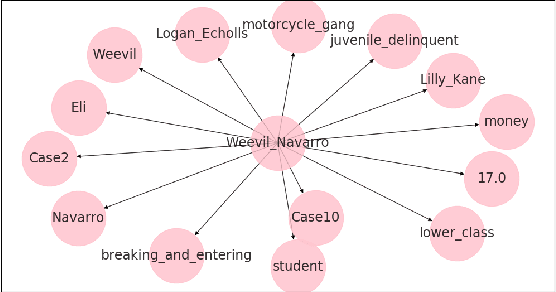
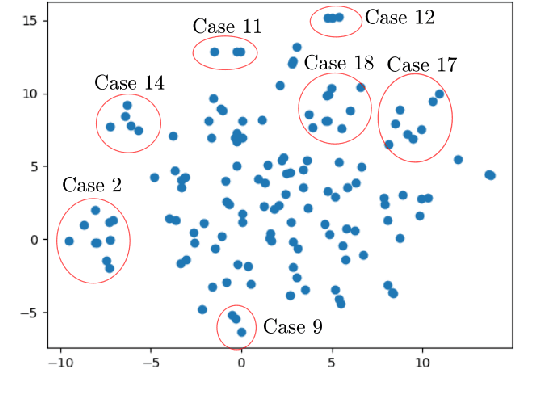
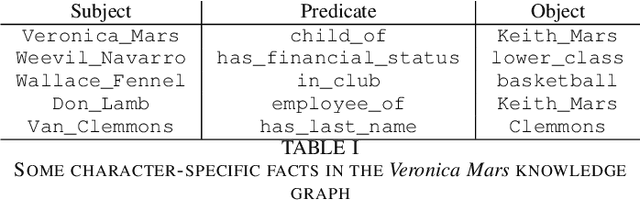
We present a preliminary study of a knowledge graph created from season one of the television show Veronica Mars, which follows the eponymous young private investigator as she attempts to solve the murder of her best friend Lilly Kane. We discuss various techniques for mining the knowledge graph for clues and potential suspects. We also discuss best practice for collaboratively constructing knowledge graphs from television shows.
Zero Shot Learning with the Isoperimetric Loss
Mar 15, 2019
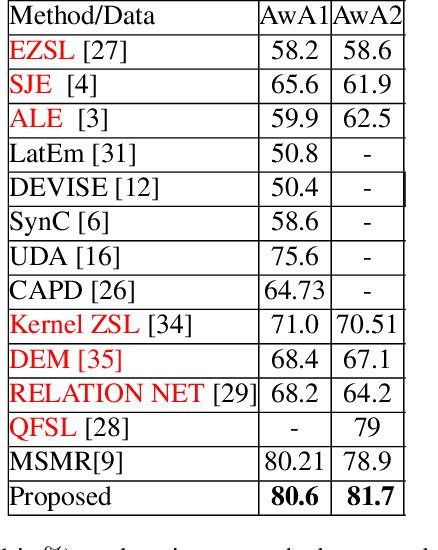
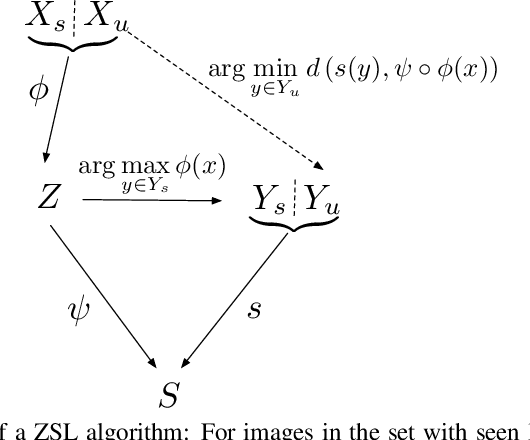
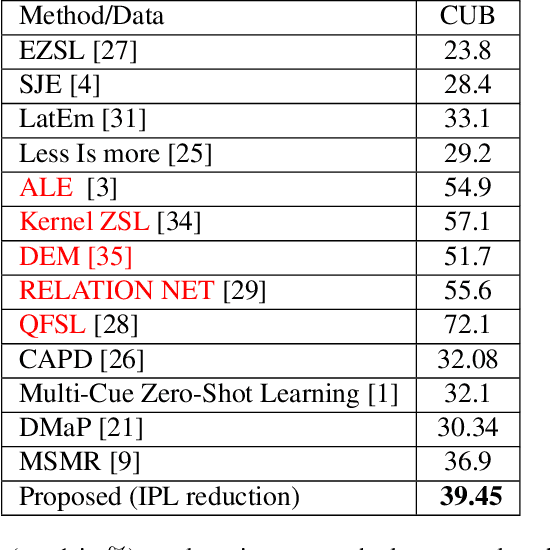
We introduce the isoperimetric loss as a regularization criterion for learning the map from a visual representation to a semantic embedding, to be used to transfer knowledge to unknown classes in a zero-shot learning setting. We use a pre-trained deep neural network model as a visual representation of image data, a Word2Vec embedding of class labels, and linear maps between the visual and semantic embedding spaces. However, the spaces themselves are not linear, and we postulate the sample embedding to be populated by noisy samples near otherwise smooth manifolds. We exploit the graph structure defined by the sample points to regularize the estimates of the manifolds by inferring the graph connectivity using a generalization of the isoperimetric inequalities from Riemannian geometry to graphs. Surprisingly, this regularization alone, paired with the simplest baseline model, outperforms the state-of-the-art among fully automated methods in zero-shot learning benchmarks such as AwA and CUB. This improvement is achieved solely by learning the structure of the underlying spaces by imposing regularity.
A Harmonic Extension Approach for Collaborative Ranking
Feb 16, 2016
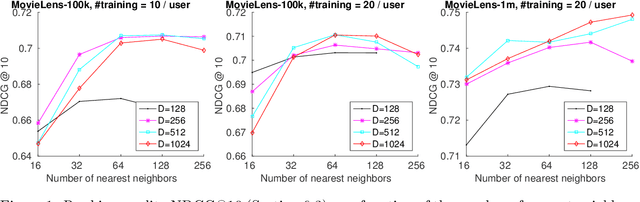
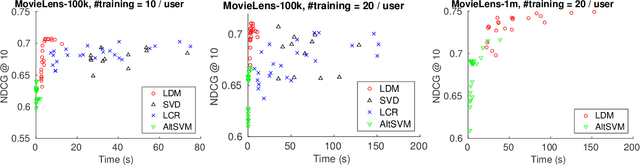

We present a new perspective on graph-based methods for collaborative ranking for recommender systems. Unlike user-based or item-based methods that compute a weighted average of ratings given by the nearest neighbors, or low-rank approximation methods using convex optimization and the nuclear norm, we formulate matrix completion as a series of semi-supervised learning problems, and propagate the known ratings to the missing ones on the user-user or item-item graph globally. The semi-supervised learning problems are expressed as Laplace-Beltrami equations on a manifold, or namely, harmonic extension, and can be discretized by a point integral method. We show that our approach does not impose a low-rank Euclidean subspace on the data points, but instead minimizes the dimension of the underlying manifold. Our method, named LDM (low dimensional manifold), turns out to be particularly effective in generating rankings of items, showing decent computational efficiency and robust ranking quality compared to state-of-the-art methods.