 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Important Sensory Feedback for Learning Locomotion Skills
Jun 29, 2023Robot motor skills can be learned through deep reinforcement learning (DRL) by neural networks as state-action mappings. While the selection of state observations is crucial, there has been a lack of quantitative analysis to date. Here, we present a systematic saliency analysis that quantitatively evaluates the relative importance of different feedback states for motor skills learned through DRL. Our approach can identify the most essential feedback states for locomotion skills, including balance recovery, trotting, bounding, pacing and galloping. By using only key states including joint positions, gravity vector, base linear and angular velocities, we demonstrate that a simulated quadruped robot can achieve robust performance in various test scenarios across these distinct skills. The benchmarks using task performance metrics show that locomotion skills learned with key states can achieve comparable performance to those with all states, and the task performance or learning success rate will drop significantly if key states are missing. This work provides quantitative insights into the relationship between state observations and specific types of motor skills, serving as a guideline for robot motor learning. The proposed method is applicable to differentiable state-action mapping, such as neural network based control policies, enabling the learning of a wide range of motor skills with minimal sensing dependencies.
Oncilla robot: a versatile open-source quadruped research robot with compliant pantograph legs
Jun 16, 2018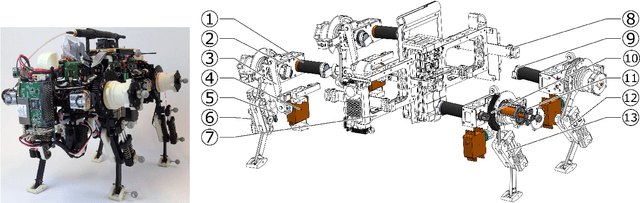
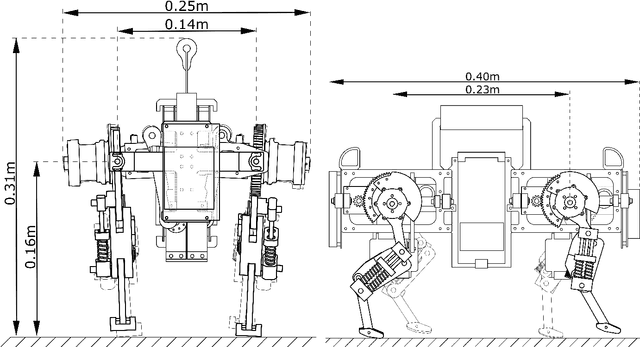
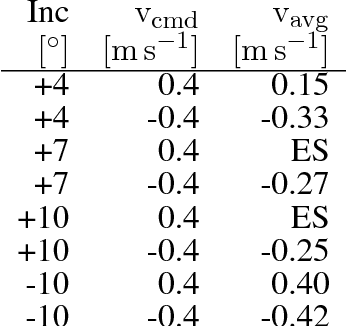
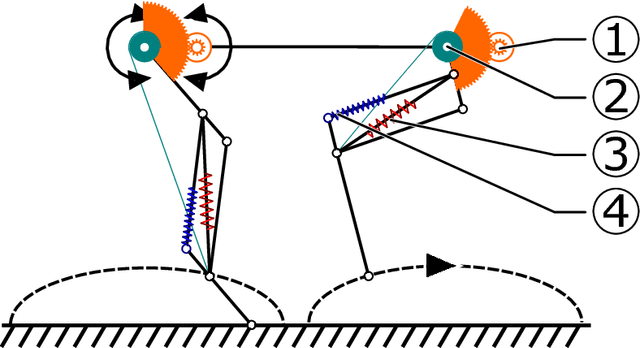
We present Oncilla robot, a novel mobile, quadruped legged locomotion machine. This large-cat sized, 5.1 robot is one of a kind of a recent, bioinspired legged robot class designed with the capability of model-free locomotion control. Animal legged locomotion in rough terrain is clearly shaped by sensor feedback systems. Results with Oncilla robot show that agile and versatile locomotion is possible without sensory signals to some extend, and tracking becomes robust when feedback control is added (Ajaoolleian 2015). By incorporating mechanical and control blueprints inspired from animals, and by observing the resulting robot locomotion characteristics, we aim to understand the contribution of individual components. Legged robots have a wide mechanical and control design parameter space, and a unique potential as research tools to investigate principles of biomechanics and legged locomotion control. But the hardware and controller design can be a steep initial hurdle for academic research. To facilitate the easy start and development of legged robots, Oncilla-robot's blueprints are available through open-source. [...]
Scalable closed-form trajectories for periodic and non-periodic human-like walking
Mar 27, 2018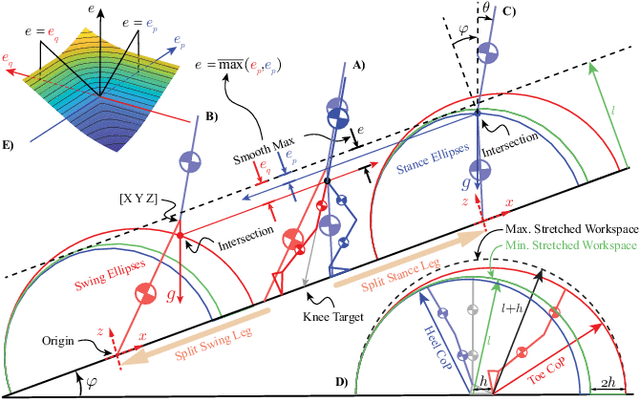
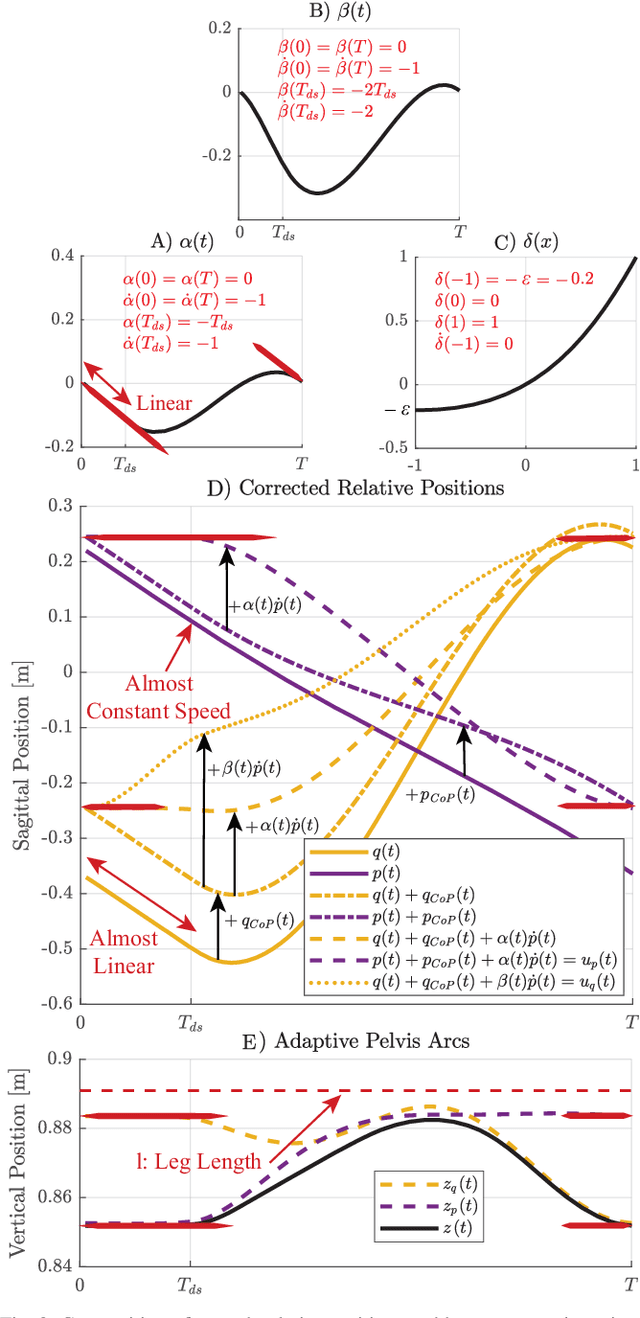
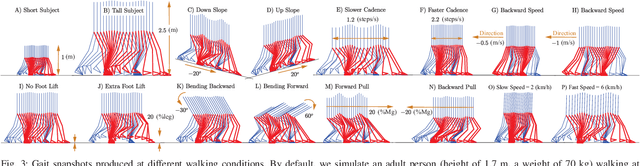
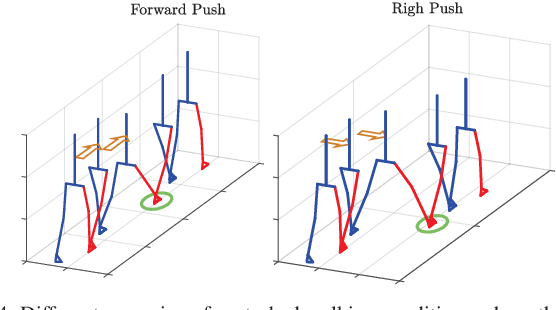
We present a new framework to generate human-like lower-limb trajectories in periodic and non-periodic walking conditions. In our method, walking dynamics is encoded in 3LP, a linear simplified model composed of three pendulums to model falling, swing and torso balancing dynamics. To stabilize the motion, we use an optimal time-projecting controller which suggests new footstep locations. On top of gait generation and stabilization in the simplified space, we introduce a kinematic conversion method that synthesizes more human-like trajectories by combining geometric variables of the 3LP model adaptively. Without any tuning, numerical optimization or off-line data, our walking gaits are scalable with respect to body properties and gait parameters. We can change various parameters such as body mass and height, walking direction, speed, frequency, double support time, torso style, ground clearance and terrain inclination. We can also simulate the effect of constant external dragging forces or momentary perturbations. The proposed framework offers closed-form solutions in all the three stages which enable simulation speeds orders of magnitude faster than real time. This can be used for video games and animations on portable electronic devices with a limited power. It also gives insights for generation of more human-like walking gaits with humanoid robots.