 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable closed-form trajectories for periodic and non-periodic human-like walking
Paper and Code
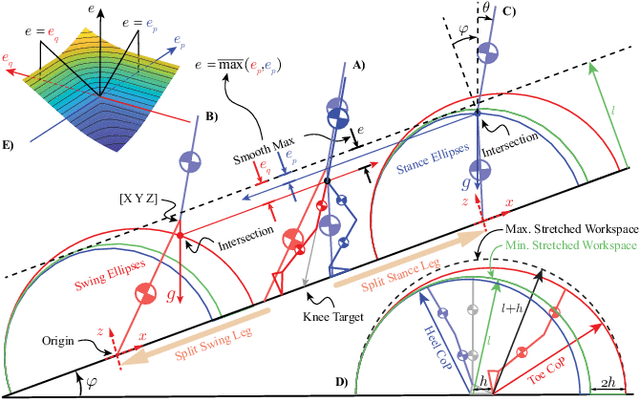
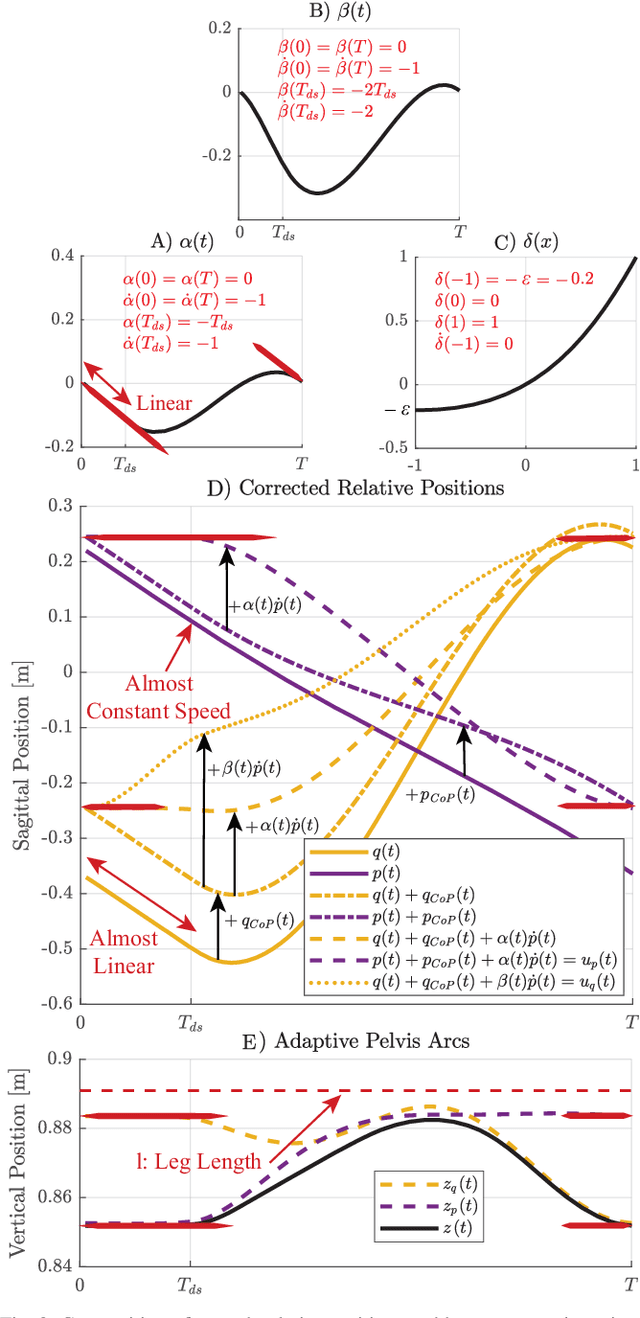
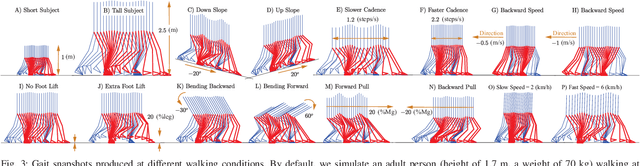
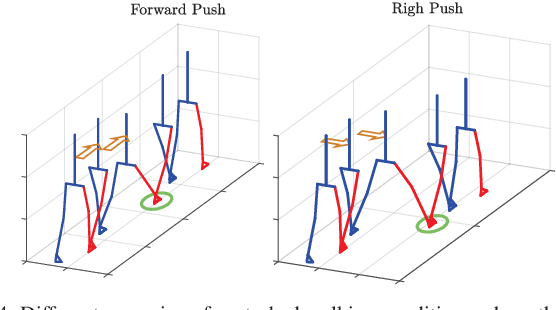
We present a new framework to generate human-like lower-limb trajectories in periodic and non-periodic walking conditions. In our method, walking dynamics is encoded in 3LP, a linear simplified model composed of three pendulums to model falling, swing and torso balancing dynamics. To stabilize the motion, we use an optimal time-projecting controller which suggests new footstep locations. On top of gait generation and stabilization in the simplified space, we introduce a kinematic conversion method that synthesizes more human-like trajectories by combining geometric variables of the 3LP model adaptively. Without any tuning, numerical optimization or off-line data, our walking gaits are scalable with respect to body properties and gait parameters. We can change various parameters such as body mass and height, walking direction, speed, frequency, double support time, torso style, ground clearance and terrain inclination. We can also simulate the effect of constant external dragging forces or momentary perturbations. The proposed framework offers closed-form solutions in all the three stages which enable simulation speeds orders of magnitude faster than real time. This can be used for video games and animations on portable electronic devices with a limited power. It also gives insights for generation of more human-like walking gaits with humanoid robots.