 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirLoc: Object-based Indoor Relocalization
Apr 03, 2023



Indoor relocalization is vital for both robotic tasks like autonomous exploration and civil applications such as navigation with a cell phone in a shopping mall. Some previous approaches adopt geometrical information such as key-point features or local textures to carry out indoor relocalization, but they either easily fail in an environment with visually similar scenes or require many database images. Inspired by the fact that humans often remember places by recognizing unique landmarks, we resort to objects, which are more informative than geometry elements. In this work, we propose a simple yet effective object-based indoor relocalization approach, dubbed AirLoc. To overcome the critical challenges of object reidentification and remembering object relationships, we extract object-wise appearance embedding and inter-object geometric relationships. The geometry and appearance features are integrated to generate cumulative scene features. This results in a robust, accurate, and portable indoor relocalization system, which outperforms the state-of-the-art methods in room-level relocalization by 9.5% of PR-AUC and 7% of accuracy. In addition to exhaustive evaluation, we also carry out real-world tests, where AirLoc shows robustness in challenges like severe occlusion, perceptual aliasing, viewpoint shift, and deformation.
PyPose: A Library for Robot Learning with Physics-based Optimization
Sep 30, 2022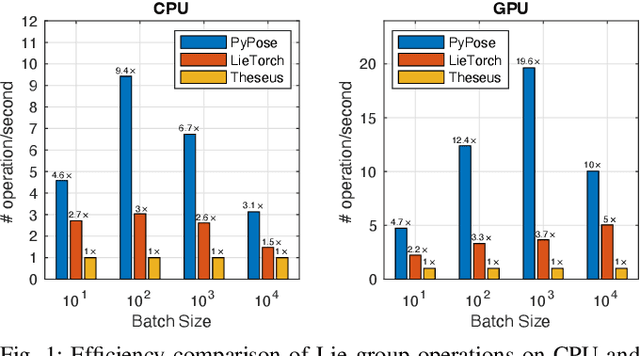
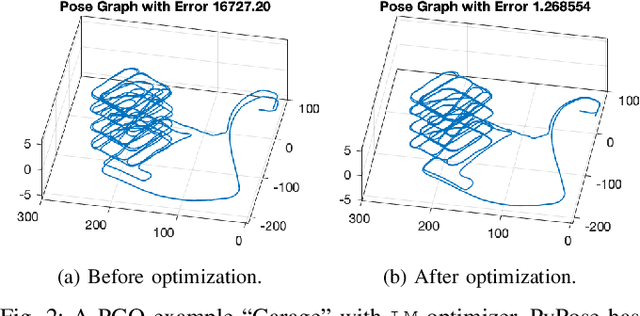
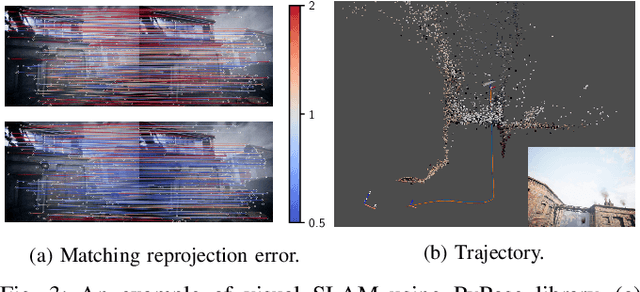
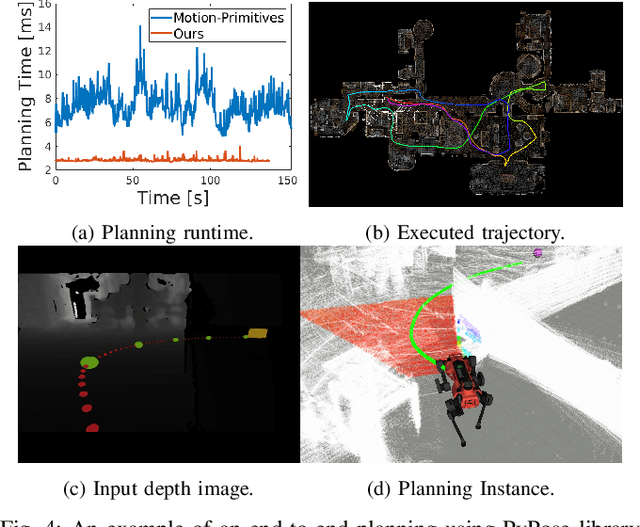
Deep learning has had remarkable success in robotic perception, but its data-centric nature suffers when it comes to generalizing to ever-changing environments. By contrast, physics-based optimization generalizes better, but it does not perform as well in complicated tasks due to the lack of high-level semantic information and the reliance on manual parametric tuning. To take advantage of these two complementary worlds, we present PyPose: a robotics-oriented, PyTorch-based library that combines deep perceptual models with physics-based optimization techniques. Our design goal for PyPose is to make it user-friendly, efficient, and interpretable with a tidy and well-organized architecture. Using an imperative style interface, it can be easily integrated into real-world robotic applications. Besides, it supports parallel computing of any order gradients of Lie groups and Lie algebras and $2^{\text{nd}}$-order optimizers, such as trust region methods. Experiments show that PyPose achieves 3-20$\times$ speedup in computation compared to state-of-the-art libraries. To boost future research, we provide concrete examples across several fields of robotics, including SLAM, inertial navigation, planning, and control.