 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScrewMimic: Bimanual Imitation from Human Videos with Screw Space Projection
May 06, 2024Bimanual manipulation is a longstanding challenge in robotics due to the large number of degrees of freedom and the strict spatial and temporal synchronization required to generate meaningful behavior. Humans learn bimanual manipulation skills by watching other humans and by refining their abilities through play. In this work, we aim to enable robots to learn bimanual manipulation behaviors from human video demonstrations and fine-tune them through interaction. Inspired by seminal work in psychology and biomechanics, we propose modeling the interaction between two hands as a serial kinematic linkage -- as a screw motion, in particular, that we use to define a new action space for bimanual manipulation: screw actions. We introduce ScrewMimic, a framework that leverages this novel action representation to facilitate learning from human demonstration and self-supervised policy fine-tuning. Our experiments demonstrate that ScrewMimic is able to learn several complex bimanual behaviors from a single human video demonstration, and that it outperforms baselines that interpret demonstrations and fine-tune directly in the original space of motion of both arms. For more information and video results, https://robin-lab.cs.utexas.edu/ScrewMimic/
BaRiFlex: A Robotic Gripper with Versatility and Collision Robustness for Robot Learning
Dec 08, 2023We present a new approach to robot hand design specifically suited for successfully implementing robot learning methods to accomplish tasks in daily human environments. We introduce BaRiFlex, an innovative gripper design that alleviates the issues caused by unexpected contact and collisions during robot learning, offering robustness, grasping versatility, task versatility, and simplicity to the learning processes. This achievement is enabled by the incorporation of low-inertia actuators, providing high Back-drivability, and the strategic combination of Rigid and Flexible materials which enhances versatility and the gripper's resilience against unpredicted collisions. Furthermore, the integration of flexible Fin-Ray linkages and rigid linkages allows the gripper to execute compliant grasping and precise pinching. We conducted rigorous performance tests to characterize the novel gripper's compliance, durability, grasping and task versatility, and precision. We also integrated the BaRiFlex with a 7 Degree of Freedom (DoF) Franka Emika's Panda robotic arm to evaluate its capacity to support a trial-and-error (reinforcement learning) training procedure. The results of our experimental study are then compared to those obtained using the original rigid Franka Hand and a reference Fin-Ray soft gripper, demonstrating the superior capabilities and advantages of our developed gripper system.
REFLECT: Summarizing Robot Experiences for Failure Explanation and Correction
Jul 12, 2023



The ability to detect and analyze failed executions automatically is crucial for an explainable and robust robotic system. Recently, Large Language Models (LLMs) have demonstrated strong reasoning abilities on textual inputs. To leverage the power of LLM for robot failure explanation, we introduce a framework REFLECT, which queries LLM to identify and explain robot failures given a hierarchical summary of robot past experiences generated from multi-sensory data. Conditioned on the explanation, a task planner will generate an executable plan for the robot to correct the failure and complete the task. To systematically evaluate the framework, we create the RoboFail dataset with a variety of tasks and failure scenarios. We demonstrate that the LLM-based framework is able to generate informative failure explanations that assist successful correction planning. Videos and code available at: https://roboreflect.github.io/.
Bag All You Need: Learning a Generalizable Bagging Strategy for Heterogeneous Objects
Oct 18, 2022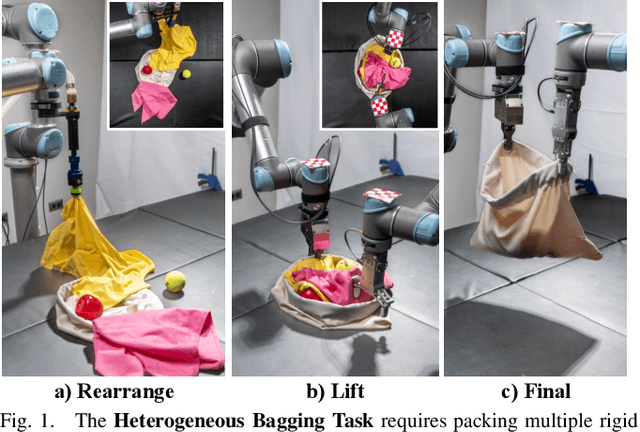
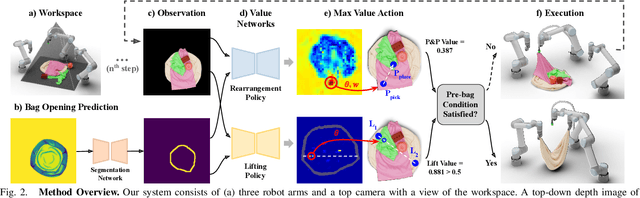
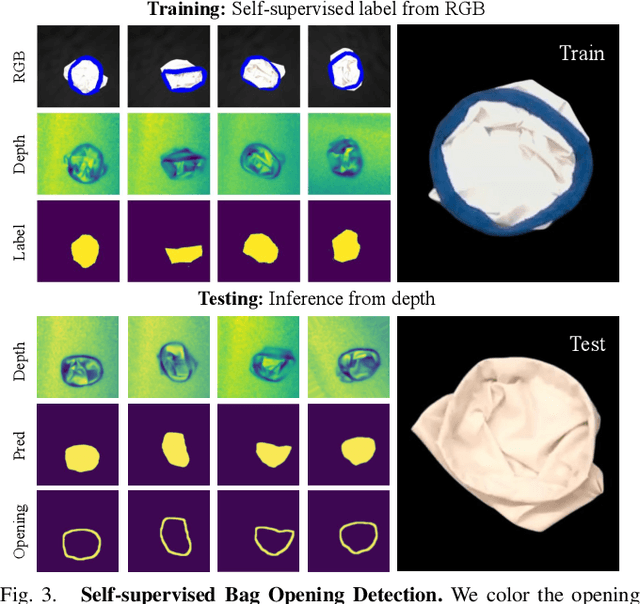

We introduce a practical robotics solution for the task of heterogeneous bagging, requiring the placement of multiple rigid and deformable objects into a deformable bag. This is a difficult task as it features complex interactions between multiple highly deformable objects under limited observability. To tackle these challenges, we propose a robotic system consisting of two learned policies: a rearrangement policy that learns to place multiple rigid objects and fold deformable objects in order to achieve desirable pre-bagging conditions, and a lifting policy to infer suitable grasp points for bi-manual bag lifting. We evaluate these learned policies on a real-world three-arm robot platform that achieves a 70% heterogeneous bagging success rate with novel objects. To facilitate future research and comparison, we also develop a novel heterogeneous bagging simulation benchmark that will be made publicly available.
Automatic Quantification and Visualization of Street Trees
Jan 17, 2022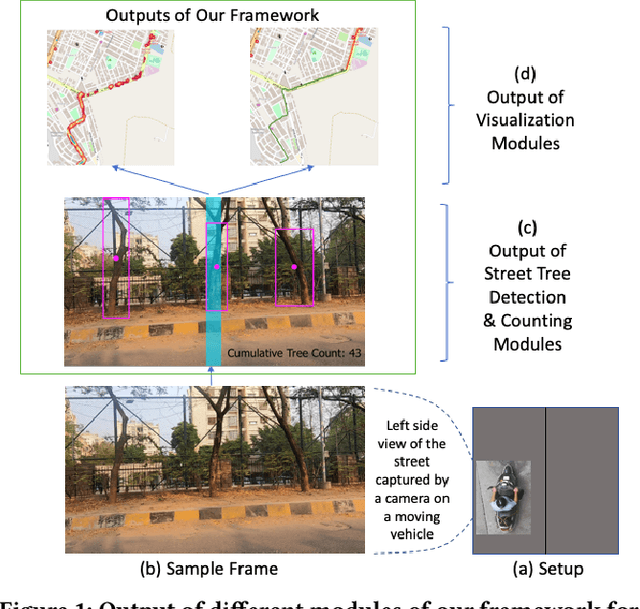
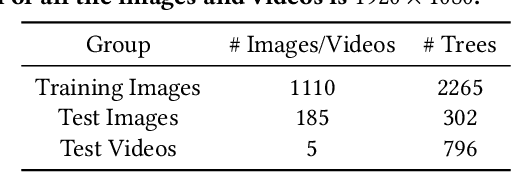
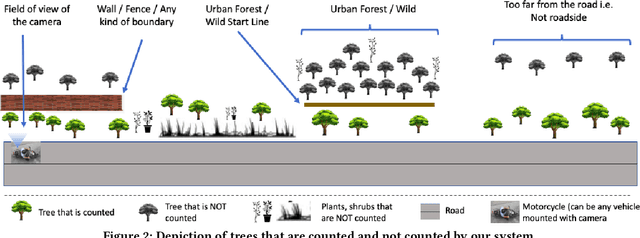
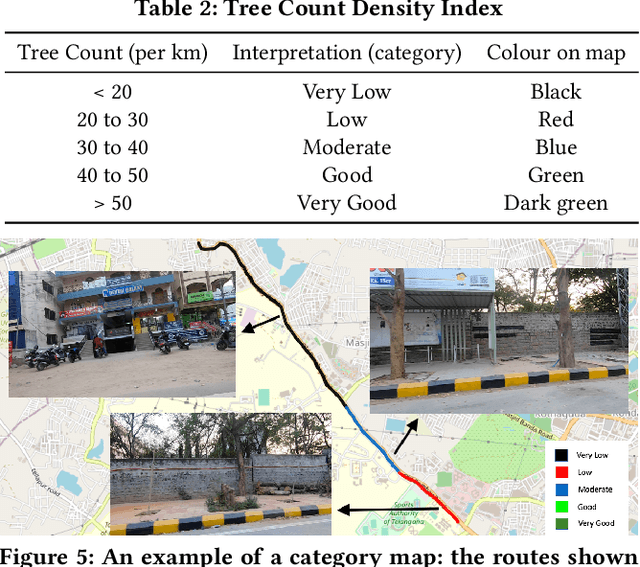
Assessing the number of street trees is essential for evaluating urban greenery and can help municipalities employ solutions to identify tree-starved streets. It can also help identify roads with different levels of deforestation and afforestation over time. Yet, there has been little work in the area of street trees quantification. This work first explains a data collection setup carefully designed for counting roadside trees. We then describe a unique annotation procedure aimed at robustly detecting and quantifying trees. We work on a dataset of around 1300 Indian road scenes annotated with over 2500 street trees. We additionally use the five held-out videos covering 25 km of roads for counting trees. We finally propose a street tree detection, counting, and visualization framework using current object detectors and a novel yet simple counting algorithm owing to the thoughtful collection setup. We find that the high-level visualizations based on the density of trees on the routes and Kernel Density Ranking (KDR) provide a quick, accurate, and inexpensive way to recognize tree-starved streets. We obtain a tree detection mAP of 83.74% on the test images, which is a 2.73% improvement over our baseline. We propose Tree Count Density Classification Accuracy (TCDCA) as an evaluation metric to measure tree density. We obtain TCDCA of 96.77% on the test videos, with a remarkable improvement of 22.58% over baseline, and demonstrate that our counting module's performance is close to human level. Source code: https://github.com/iHubData-Mobility/public-tree-counting.