 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Foundational Models for Single-Chip Radar
Sep 15, 2025mmWave radars are compact, inexpensive, and durable sensors that are robust to occlusions and work regardless of environmental conditions, such as weather and darkness. However, this comes at the cost of poor angular resolution, especially for inexpensive single-chip radars, which are typically used in automotive and indoor sensing applications. Although many have proposed learning-based methods to mitigate this weakness, no standardized foundational models or large datasets for the mmWave radar have emerged, and practitioners have largely trained task-specific models from scratch using relatively small datasets. In this paper, we collect (to our knowledge) the largest available raw radar dataset with 1M samples (29 hours) and train a foundational model for 4D single-chip radar, which can predict 3D occupancy and semantic segmentation with quality that is typically only possible with much higher resolution sensors. We demonstrate that our Generalizable Radar Transformer (GRT) generalizes across diverse settings, can be fine-tuned for different tasks, and shows logarithmic data scaling of 20\% per $10\times$ data. We also run extensive ablations on common design decisions, and find that using raw radar data significantly outperforms widely-used lossy representations, equivalent to a $10\times$ increase in training data. Finally, we roughly estimate that $\approx$100M samples (3000 hours) of data are required to fully exploit the potential of GRT.
Interference-Aware Edge Runtime Prediction with Conformal Matrix Completion
Mar 09, 2025
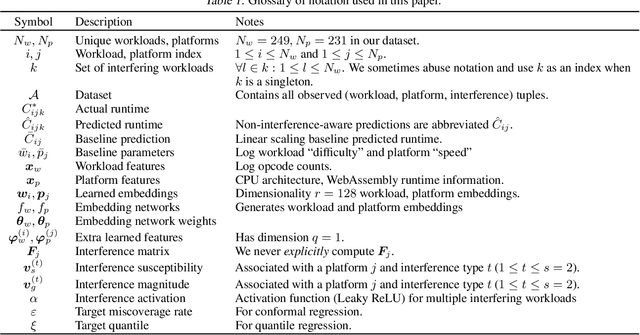

Accurately estimating workload runtime is a longstanding goal in computer systems, and plays a key role in efficient resource provisioning, latency minimization, and various other system management tasks. Runtime prediction is particularly important for managing increasingly complex distributed systems in which more sophisticated processing is pushed to the edge in search of better latency. Previous approaches for runtime prediction in edge systems suffer from poor data efficiency or require intensive instrumentation; these challenges are compounded in heterogeneous edge computing environments, where historical runtime data may be sparsely available and instrumentation is often challenging. Moreover, edge computing environments often feature multi-tenancy due to limited resources at the network edge, potentially leading to interference between workloads and further complicating the runtime prediction problem. Drawing from insights across machine learning and computer systems, we design a matrix factorization-inspired method that generates accurate interference-aware predictions with tight provably-guaranteed uncertainty bounds. We validate our method on a novel WebAssembly runtime dataset collected from 24 unique devices, achieving a prediction error of 5.2% -- 2x better than a naive application of existing methods.
DART: Implicit Doppler Tomography for Radar Novel View Synthesis
Mar 06, 2024



Simulation is an invaluable tool for radio-frequency system designers that enables rapid prototyping of various algorithms for imaging, target detection, classification, and tracking. However, simulating realistic radar scans is a challenging task that requires an accurate model of the scene, radio frequency material properties, and a corresponding radar synthesis function. Rather than specifying these models explicitly, we propose DART - Doppler Aided Radar Tomography, a Neural Radiance Field-inspired method which uses radar-specific physics to create a reflectance and transmittance-based rendering pipeline for range-Doppler images. We then evaluate DART by constructing a custom data collection platform and collecting a novel radar dataset together with accurate position and instantaneous velocity measurements from lidar-based localization. In comparison to state-of-the-art baselines, DART synthesizes superior radar range-Doppler images from novel views across all datasets and additionally can be used to generate high quality tomographic images.
High Resolution Point Clouds from mmWave Radar
Jun 18, 2022
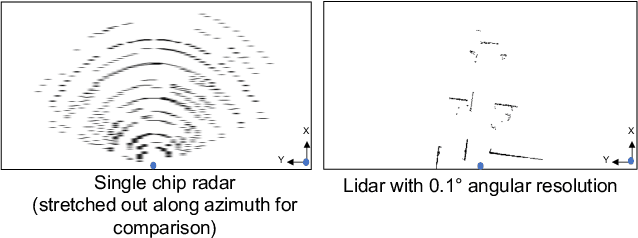
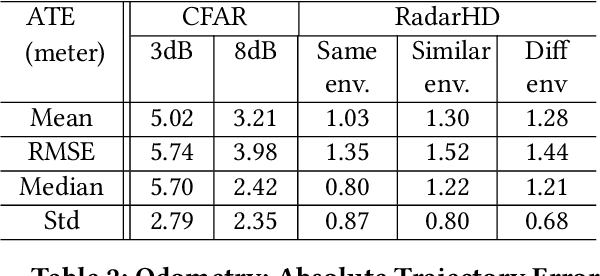

This paper explores a machine learning approach for generating high resolution point clouds from a single-chip mmWave radar. Unlike lidar and vision-based systems, mmWave radar can operate in harsh environments and see through occlusions like smoke, fog, and dust. Unfortunately, current mmWave processing techniques offer poor spatial resolution compared to lidar point clouds. This paper presents RadarHD, an end-to-end neural network that constructs lidar-like point clouds from low resolution radar input. Enhancing radar images is challenging due to the presence of specular and spurious reflections. Radar data also doesn't map well to traditional image processing techniques due to the signal's sinc-like spreading pattern. We overcome these challenges by training RadarHD on a large volume of raw I/Q radar data paired with lidar point clouds across diverse indoor settings. Our experiments show the ability to generate rich point clouds even in scenes unobserved during training and in the presence of heavy smoke occlusion. Further, RadarHD's point clouds are high-quality enough to work with existing lidar odometry and mapping workflows.
Quantum Extremal Learning
May 05, 2022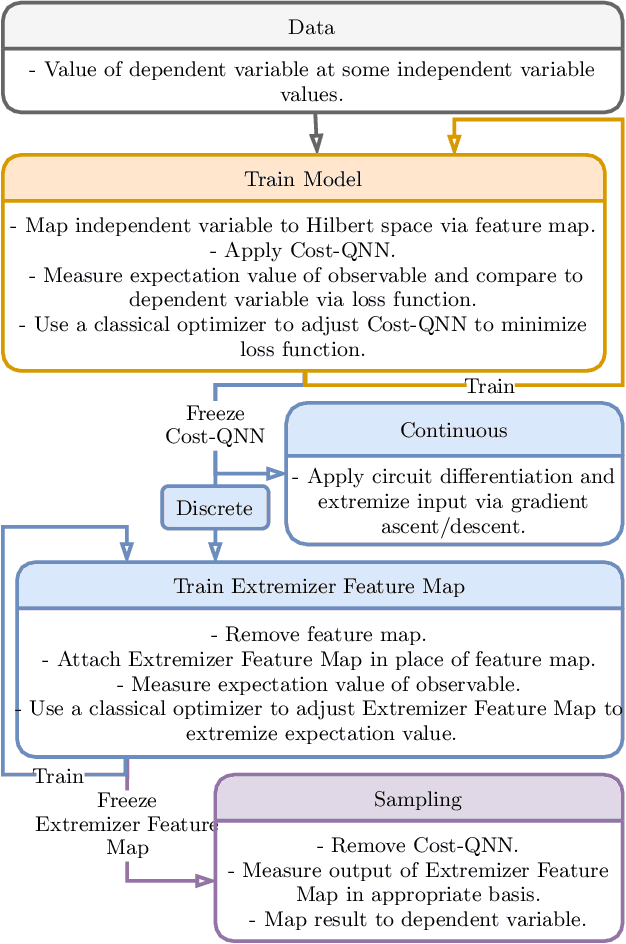
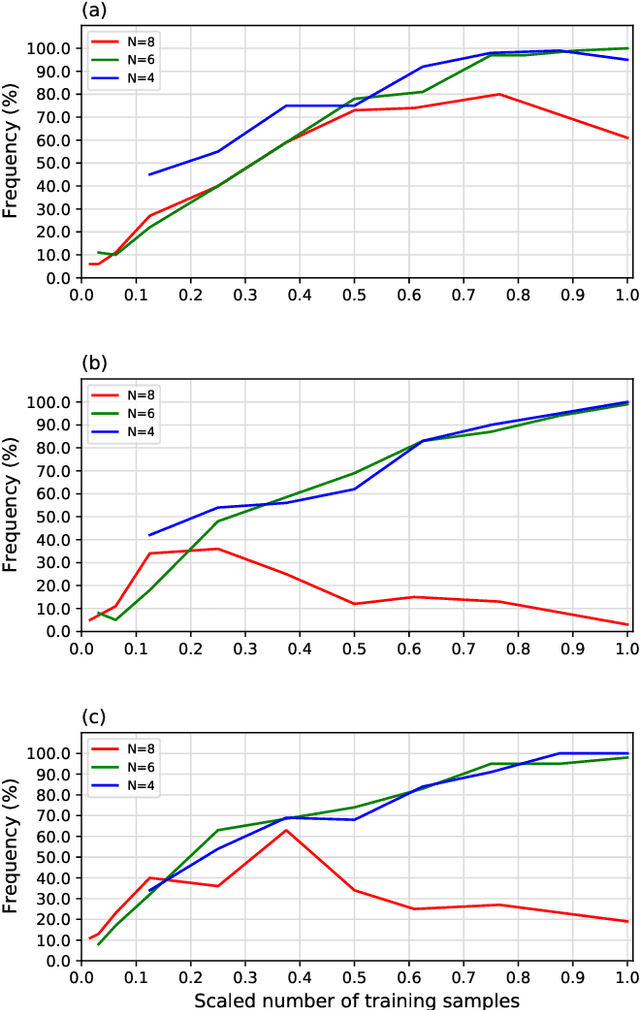
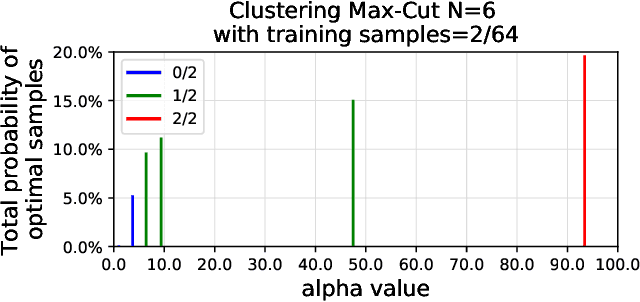
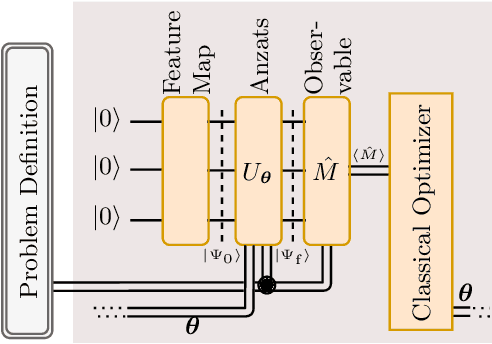
We propose a quantum algorithm for `extremal learning', which is the process of finding the input to a hidden function that extremizes the function output, without having direct access to the hidden function, given only partial input-output (training) data. The algorithm, called quantum extremal learning (QEL), consists of a parametric quantum circuit that is variationally trained to model data input-output relationships and where a trainable quantum feature map, that encodes the input data, is analytically differentiated in order to find the coordinate that extremizes the model. This enables the combination of established quantum machine learning modelling with established quantum optimization, on a single circuit/quantum computer. We have tested our algorithm on a range of classical datasets based on either discrete or continuous input variables, both of which are compatible with the algorithm. In case of discrete variables, we test our algorithm on synthetic problems formulated based on Max-Cut problem generators and also considering higher order correlations in the input-output relationships. In case of the continuous variables, we test our algorithm on synthetic datasets in 1D and simple ordinary differential functions. We find that the algorithm is able to successfully find the extremal value of such problems, even when the training dataset is sparse or a small fraction of the input configuration space. We additionally show how the algorithm can be used for much more general cases of higher dimensionality, complex differential equations, and with full flexibility in the choice of both modeling and optimization ansatz. We envision that due to its general framework and simple construction, the QEL algorithm will be able to solve a wide variety of applications in different fields, opening up areas of further research.
Tracking Motion and Proxemics using Thermal-sensor Array
Nov 25, 2015


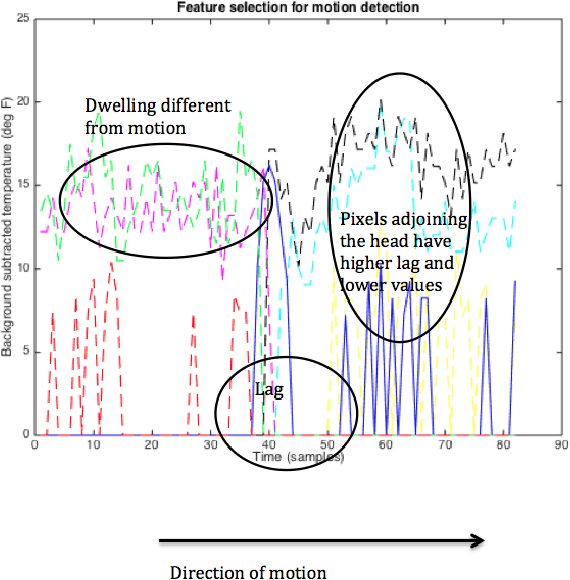
Indoor tracking has all-pervasive applications beyond mere surveillance, for example in education, health monitoring, marketing, energy management and so on. Image and video based tracking systems are intrusive. Thermal array sensors on the other hand can provide coarse-grained tracking while preserving privacy of the subjects. The goal of the project is to facilitate motion detection and group proxemics modeling using an 8 x 8 infrared sensor array. Each of the 8 x 8 pixels is a temperature reading in Fahrenheit. We refer to each 8 x 8 matrix as a scene. We collected approximately 902 scenes with different configurations of human groups and different walking directions. We infer direction of motion of a subject across a set of scenes as left-to-right, right-to-left, up-to-down and down-to-up using cross-correlation analysis. We used features from connected component analysis of each background subtracted scene and performed Support Vector Machine classification to estimate number of instances of human subjects in the scene.