 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterference-Aware Edge Runtime Prediction with Conformal Matrix Completion
Mar 09, 2025
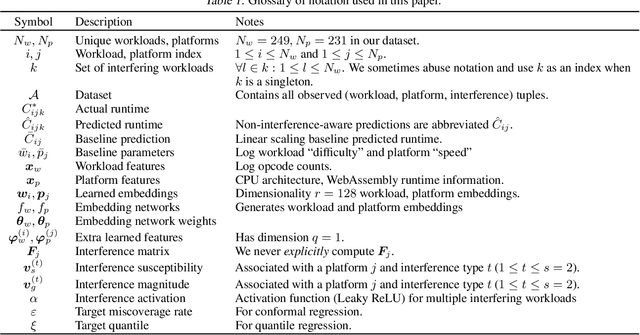

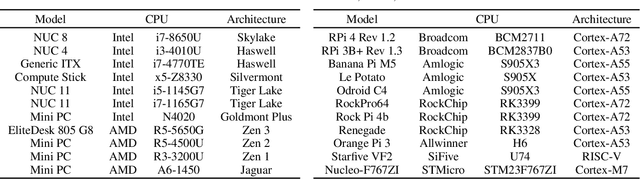
Accurately estimating workload runtime is a longstanding goal in computer systems, and plays a key role in efficient resource provisioning, latency minimization, and various other system management tasks. Runtime prediction is particularly important for managing increasingly complex distributed systems in which more sophisticated processing is pushed to the edge in search of better latency. Previous approaches for runtime prediction in edge systems suffer from poor data efficiency or require intensive instrumentation; these challenges are compounded in heterogeneous edge computing environments, where historical runtime data may be sparsely available and instrumentation is often challenging. Moreover, edge computing environments often feature multi-tenancy due to limited resources at the network edge, potentially leading to interference between workloads and further complicating the runtime prediction problem. Drawing from insights across machine learning and computer systems, we design a matrix factorization-inspired method that generates accurate interference-aware predictions with tight provably-guaranteed uncertainty bounds. We validate our method on a novel WebAssembly runtime dataset collected from 24 unique devices, achieving a prediction error of 5.2% -- 2x better than a naive application of existing methods.
MPF6D: Masked Pyramid Fusion 6D Pose Estimation
Nov 17, 2021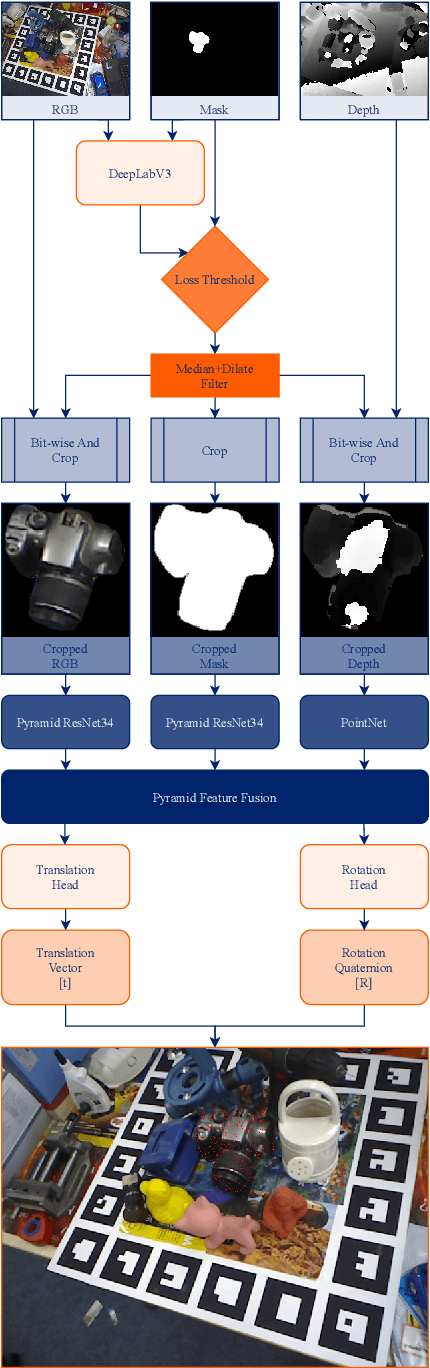
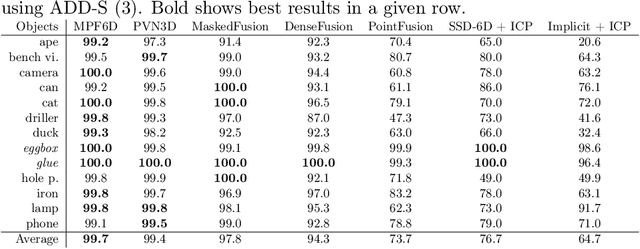
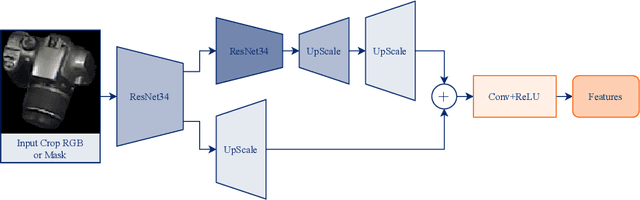
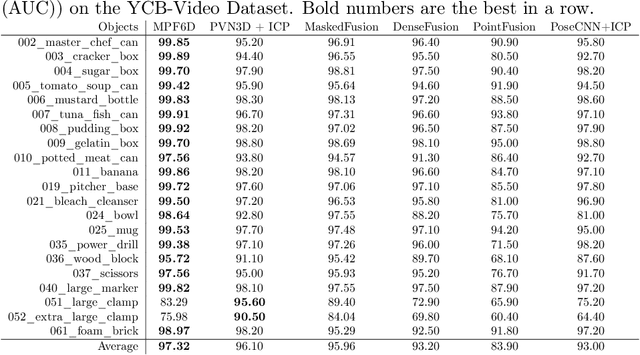
Object pose estimation has multiple important applications, such as robotic grasping and augmented reality. We present a new method to estimate the 6D pose of objects that improves upon the accuracy of current proposals and can still be used in real-time. Our method uses RGB-D data as input to segment objects and estimate their pose. It uses a neural network with multiple heads, one head estimates the object classification and generates the mask, the second estimates the values of the translation vector and the last head estimates the values of the quaternion that represents the rotation of the object. These heads leverage a pyramid architecture used during feature extraction and feature fusion. Our method can be used in real-time with its low inference time of 0.12 seconds and has high accuracy. With this combination of fast inference and good accuracy it is possible to use our method in robotic pick and place tasks and/or augmented reality applications.
MaskedFusion: Mask-based 6D Object Pose Detection
Nov 18, 2019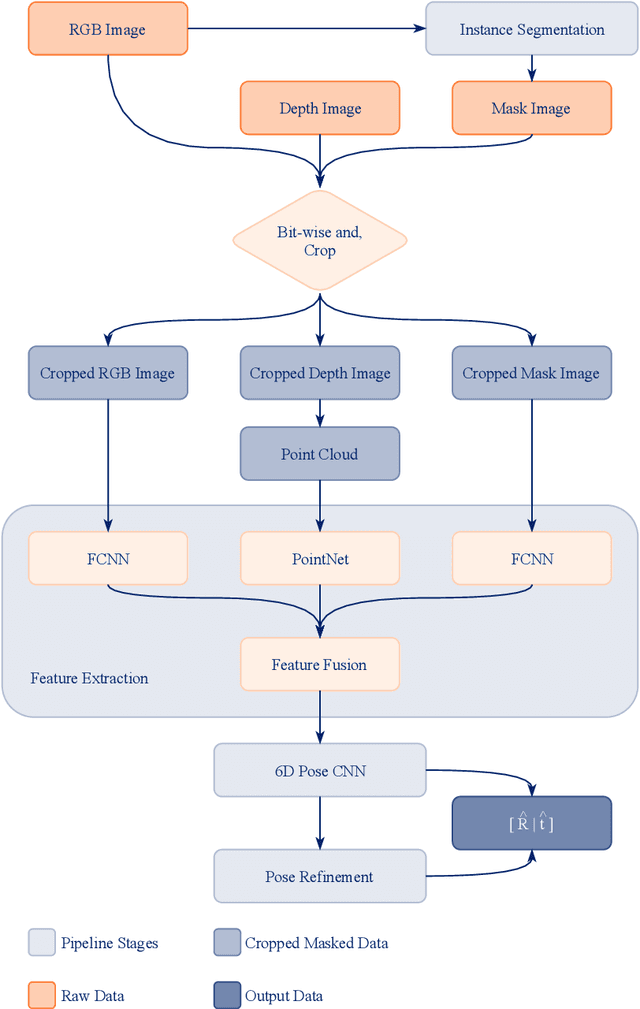
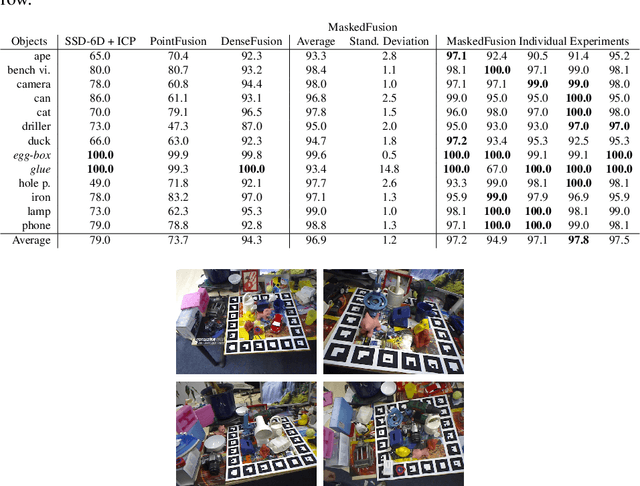
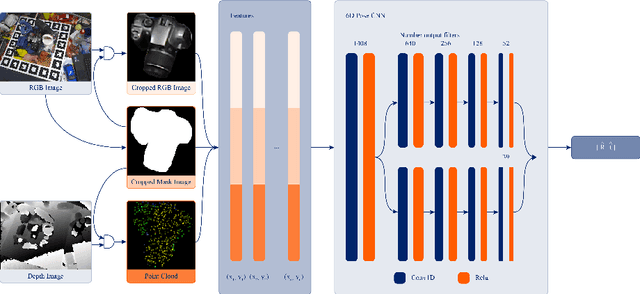
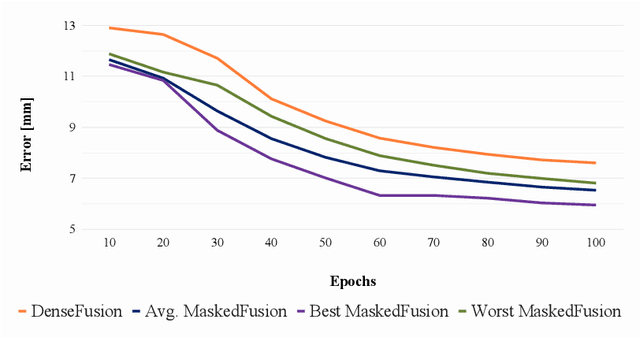
MaskedFusion is a framework to estimate 6D pose of objects using RGB-D data, with an architecture that leverages multiple stages in a pipeline to achieve accurate 6D poses. 6D pose estimation is an open challenge due to complex world objects and many possible problems when capturing data from the real world, e.g., occlusions, truncations, and noise in the data. Achieving accurate 6D poses will improve results in other open problems like robot grasping or positioning objects in augmented reality. MaskedFusion improves upon DenseFusion where the key differences are in pre-processing data before it enters the Neural Network (NN), eliminating non-relevant data, and adding additional features extracted from the mask of the objects to the NN to improve its estimation. It achieved $5.9mm$ average error on the widely used LineMOD dataset, which is an improvement, of more than 20\%, compared to the state-of-the-art method, DenseFusion.
Controlling Robots using Artificial Intelligence and a Consortium Blockchain
Mar 02, 2019



Blockchain is a disruptive technology that is normally used within financial applications, however it can be very beneficial also in certain robotic contexts, such as when an immutable register of events is required. Among the several properties of Blockchain that can be useful within robotic environments, we find not just immutability but also decentralization of the data, irreversibility, accessibility and non-repudiation. In this paper, we propose an architecture that uses blockchain as a ledger and smart-contract technology for robotic control by using external parties, Oracles, to process data. We show how to register events in a secure way, how it is possible to use smart-contracts to control robots and how to interface with external Artificial Intelligence algorithms for image analysis. The proposed architecture is modular and can be used in multiple contexts such as in manufacturing, network control, robot control, and others, since it is easy to integrate, adapt, maintain and extend to new domains.