 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental Sequence Classification with Temporal Consistency
May 22, 2025We address the problem of incremental sequence classification, where predictions are updated as new elements in the sequence are revealed. Drawing on temporal-difference learning from reinforcement learning, we identify a temporal-consistency condition that successive predictions should satisfy. We leverage this condition to develop a novel loss function for training incremental sequence classifiers. Through a concrete example, we demonstrate that optimizing this loss can offer substantial gains in data efficiency. We apply our method to text classification tasks and show that it improves predictive accuracy over competing approaches on several benchmark datasets. We further evaluate our approach on the task of verifying large language model generations for correctness in grade-school math problems. Our results show that models trained with our method are better able to distinguish promising generations from unpromising ones after observing only a few tokens.
Learning GFlowNets from partial episodes for improved convergence and stability
Sep 30, 2022
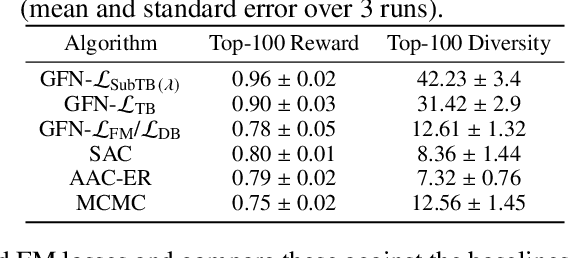

Generative flow networks (GFlowNets) are a family of algorithms for training a sequential sampler of discrete objects under an unnormalized target density and have been successfully used for various probabilistic modeling tasks. Existing training objectives for GFlowNets are either local to states or transitions, or propagate a reward signal over an entire sampling trajectory. We argue that these alternatives represent opposite ends of a gradient bias-variance tradeoff and propose a way to exploit this tradeoff to mitigate its harmful effects. Inspired by the TD($\lambda$) algorithm in reinforcement learning, we introduce subtrajectory balance or SubTB($\lambda$), a GFlowNet training objective that can learn from partial action subsequences of varying lengths. We show that SubTB($\lambda$) accelerates sampler convergence in previously studied and new environments and enables training GFlowNets in environments with longer action sequences and sparser reward landscapes than what was possible before. We also perform a comparative analysis of stochastic gradient dynamics, shedding light on the bias-variance tradeoff in GFlowNet training and the advantages of subtrajectory balance.
The Paradox of Choice: Using Attention in Hierarchical Reinforcement Learning
Jan 24, 2022



Decision-making AI agents are often faced with two important challenges: the depth of the planning horizon, and the branching factor due to having many choices. Hierarchical reinforcement learning methods aim to solve the first problem, by providing shortcuts that skip over multiple time steps. To cope with the breadth, it is desirable to restrict the agent's attention at each step to a reasonable number of possible choices. The concept of affordances (Gibson, 1977) suggests that only certain actions are feasible in certain states. In this work, we model "affordances" through an attention mechanism that limits the available choices of temporally extended options. We present an online, model-free algorithm to learn affordances that can be used to further learn subgoal options. We investigate the role of hard versus soft attention in training data collection, abstract value learning in long-horizon tasks, and handling a growing number of choices. We identify and empirically illustrate the settings in which the paradox of choice arises, i.e. when having fewer but more meaningful choices improves the learning speed and performance of a reinforcement learning agent.