 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-Control Coupled Visual Servoing for Textureless Objects Using Keypoint-Based EKF
Feb 06, 2026Visual servoing is fundamental to robotic applications, enabling precise positioning and control. However, applying it to textureless objects remains a challenge due to the absence of reliable visual features. Moreover, adverse visual conditions, such as occlusions, often corrupt visual feedback, leading to reduced accuracy and instability in visual servoing. In this work, we build upon learning-based keypoint detection for textureless objects and propose a method that enhances robustness by tightly integrating perception and control in a closed loop. Specifically, we employ an Extended Kalman Filter (EKF) that integrates per-frame keypoint measurements to estimate 6D object pose, which drives pose-based visual servoing (PBVS) for control. The resulting camera motion, in turn, enhances the tracking of subsequent keypoints, effectively closing the perception-control loop. Additionally, unlike standard PBVS, we propose a probabilistic control law that computes both camera velocity and its associated uncertainty, enabling uncertainty-aware control for safe and reliable operation. We validate our approach on real-world robotic platforms using quantitative metrics and grasping experiments, demonstrating that our method outperforms traditional visual servoing techniques in both accuracy and practical application.
Automated Planning Domain Inference for Task and Motion Planning
Oct 21, 2024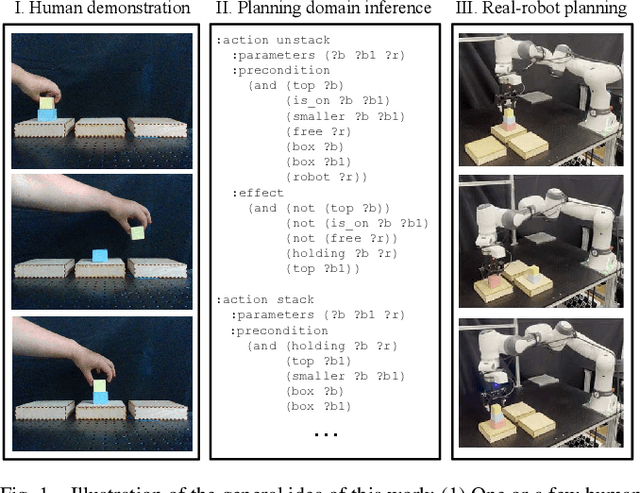
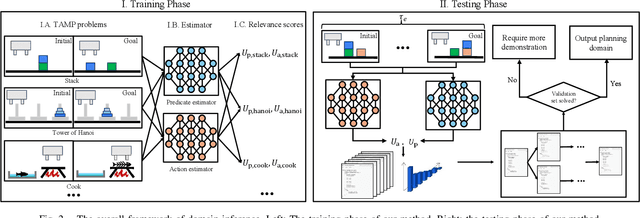
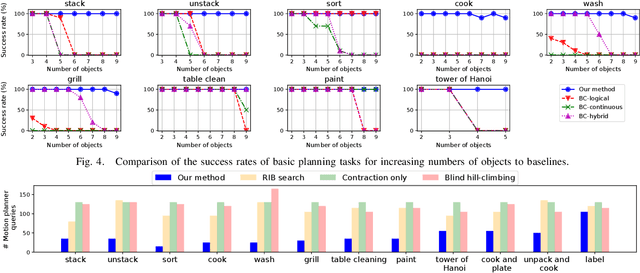
Task and motion planning (TAMP) frameworks address long and complex planning problems by integrating high-level task planners with low-level motion planners. However, existing TAMP methods rely heavily on the manual design of planning domains that specify the preconditions and postconditions of all high-level actions. This paper proposes a method to automate planning domain inference from a handful of test-time trajectory demonstrations, reducing the reliance on human design. Our approach incorporates a deep learning-based estimator that predicts the appropriate components of a domain for a new task and a search algorithm that refines this prediction, reducing the size and ensuring the utility of the inferred domain. Our method is able to generate new domains from minimal demonstrations at test time, enabling robots to handle complex tasks more efficiently. We demonstrate that our approach outperforms behavior cloning baselines, which directly imitate planner behavior, in terms of planning performance and generalization across a variety of tasks. Additionally, our method reduces computational costs and data amount requirements at test time for inferring new planning domains.
MakeWay: Object-Aware Costmaps for Proactive Indoor Navigation Using LiDAR
Aug 30, 2024



In this paper, we introduce a LiDAR-based robot navigation system, based on novel object-aware affordance-based costmaps. Utilizing a 3D object detection network, our system identifies objects of interest in LiDAR keyframes, refines their 3D poses with the Iterative Closest Point (ICP) algorithm, and tracks them via Kalman filters and the Hungarian algorithm for data association. It then updates existing object poses with new associated detections and creates new object maps for unmatched detections. Using the maintained object-level mapping system, our system creates affordance-driven object costmaps for proactive collision avoidance in path planning. Additionally, we address the scarcity of indoor semantic LiDAR data by introducing an automated labeling technique. This method utilizes a CAD model database for accurate ground-truth annotations, encompassing bounding boxes, positions, orientations, and point-wise semantics of each object in LiDAR sequences. Our extensive evaluations, conducted in both simulated and real-world robot platforms, highlights the effectiveness of proactive object avoidance by using object affordance costmaps, enhancing robotic navigation safety and efficiency. The system can operate in real-time onboard and we intend to release our code and data for public use.
What is the Impact of Releasing Code with Publications? Statistics from the Machine Learning, Robotics, and Control Communities
Aug 19, 2023Open-sourcing research publications is a key enabler for the reproducibility of studies and the collective scientific progress of a research community. As all fields of science develop more advanced algorithms, we become more dependent on complex computational toolboxes -- sharing research ideas solely through equations and proofs is no longer sufficient to communicate scientific developments. Over the past years, several efforts have highlighted the importance and challenges of transparent and reproducible research; code sharing is one of the key necessities in such efforts. In this article, we study the impact of code release on scientific research and present statistics from three research communities: machine learning, robotics, and control. We found that, over a six-year period (2016-2021), the percentages of papers with code at major machine learning, robotics, and control conferences have at least doubled. Moreover, high-impact papers were generally supported by open-source codes. As an example, the top 1% of most cited papers at the Conference on Neural Information Processing Systems (NeurIPS) consistently included open-source codes. In addition, our analysis shows that popular code repositories generally come with high paper citations, which further highlights the coupling between code sharing and the impact of scientific research. While the trends are encouraging, we would like to continue to promote and increase our efforts toward transparent, reproducible research that accelerates innovation -- releasing code with our papers is a clear first step.