 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARL: Camera-Agnostic Representation Learning for Spectral Image Analysis
Apr 27, 2025Spectral imaging offers promising applications across diverse domains, including medicine and urban scene understanding, and is already established as a critical modality in remote sensing. However, variability in channel dimensionality and captured wavelengths among spectral cameras impede the development of AI-driven methodologies, leading to camera-specific models with limited generalizability and inadequate cross-camera applicability. To address this bottleneck, we introduce $\textbf{CARL}$, a model for $\textbf{C}$amera-$\textbf{A}$gnostic $\textbf{R}$epresentation $\textbf{L}$earning across RGB, multispectral, and hyperspectral imaging modalities. To enable the conversion of a spectral image with any channel dimensionality to a camera-agnostic embedding, we introduce wavelength positional encoding and a self-attention-cross-attention mechanism to compress spectral information into learned query representations. Spectral-spatial pre-training is achieved with a novel spectral self-supervised JEPA-inspired strategy tailored to CARL. Large-scale experiments across the domains of medical imaging, autonomous driving, and satellite imaging demonstrate our model's unique robustness to spectral heterogeneity, outperforming on datasets with simulated and real-world cross-camera spectral variations. The scalability and versatility of the proposed approach position our model as a backbone for future spectral foundation models.
Deep intra-operative illumination calibration of hyperspectral cameras
Sep 11, 2024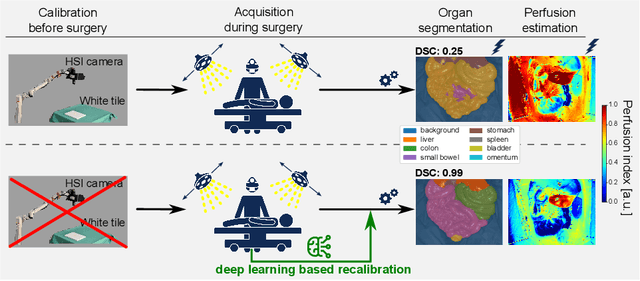
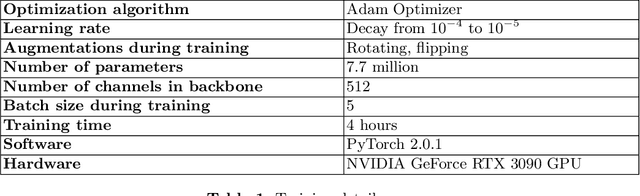

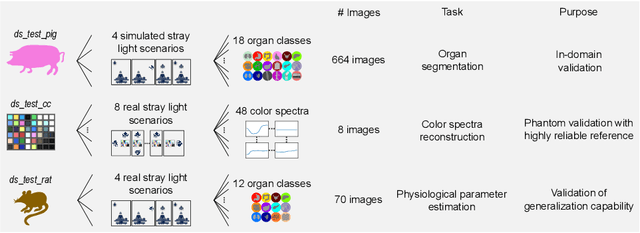
Hyperspectral imaging (HSI) is emerging as a promising novel imaging modality with various potential surgical applications. Currently available cameras, however, suffer from poor integration into the clinical workflow because they require the lights to be switched off, or the camera to be manually recalibrated as soon as lighting conditions change. Given this critical bottleneck, the contribution of this paper is threefold: (1) We demonstrate that dynamically changing lighting conditions in the operating room dramatically affect the performance of HSI applications, namely physiological parameter estimation, and surgical scene segmentation. (2) We propose a novel learning-based approach to automatically recalibrating hyperspectral images during surgery and show that it is sufficiently accurate to replace the tedious process of white reference-based recalibration. (3) Based on a total of 742 HSI cubes from a phantom, porcine models, and rats we show that our recalibration method not only outperforms previously proposed methods, but also generalizes across species, lighting conditions, and image processing tasks. Due to its simple workflow integration as well as high accuracy, speed, and generalization capabilities, our method could evolve as a central component in clinical surgical HSI.
The OPNV Data Collection: A Dataset for Infrastructure-Supported Perception Research with Focus on Public Transportation
Jul 11, 2024This paper we present our vision and ongoing work for a novel dataset designed to advance research into the interoperability of intelligent vehicles and infrastructure, specifically aimed at enhancing cooperative perception and interaction in the realm of public transportation. Unlike conventional datasets centered on ego-vehicle data, this approach encompasses both a stationary sensor tower and a moving vehicle, each equipped with cameras, LiDARs, and GNSS, while the vehicle additionally includes an inertial navigation system. Our setup features comprehensive calibration and time synchronization, ensuring seamless and accurate sensor data fusion crucial for studying complex, dynamic scenes. Emphasizing public transportation, the dataset targets to include scenes like bus station maneuvers and driving on dedicated bus lanes, reflecting the specifics of small public buses. We introduce the open-source ".4mse" file format for the new dataset, accompanied by a research kit. This kit provides tools such as ego-motion compensation or LiDAR-to-camera projection enabling advanced research on intelligent vehicle-infrastructure integration. Our approach does not include annotations; however, we plan to implement automatically generated labels sourced from state-of-the-art public repositories. Several aspects are still up for discussion, and timely feedback from the community would be greatly appreciated. A sneak preview on one data frame will be available at a Google Colab Notebook. Moreover, we will use the related GitHub Repository to collect remarks and suggestions.
On the Localization of Ultrasound Image Slices within Point Distribution Models
Sep 01, 2023Thyroid disorders are most commonly diagnosed using high-resolution Ultrasound (US). Longitudinal nodule tracking is a pivotal diagnostic protocol for monitoring changes in pathological thyroid morphology. This task, however, imposes a substantial cognitive load on clinicians due to the inherent challenge of maintaining a mental 3D reconstruction of the organ. We thus present a framework for automated US image slice localization within a 3D shape representation to ease how such sonographic diagnoses are carried out. Our proposed method learns a common latent embedding space between US image patches and the 3D surface of an individual's thyroid shape, or a statistical aggregation in the form of a statistical shape model (SSM), via contrastive metric learning. Using cross-modality registration and Procrustes analysis, we leverage features from our model to register US slices to a 3D mesh representation of the thyroid shape. We demonstrate that our multi-modal registration framework can localize images on the 3D surface topology of a patient-specific organ and the mean shape of an SSM. Experimental results indicate slice positions can be predicted within an average of 1.2 mm of the ground-truth slice location on the patient-specific 3D anatomy and 4.6 mm on the SSM, exemplifying its usefulness for slice localization during sonographic acquisitions. Code is publically available: \href{https://github.com/vuenc/slice-to-shape}{https://github.com/vuenc/slice-to-shape}