 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Tackling Complex Tasks with Reward Machines and Signal Temporal Logics
Apr 09, 2026We propose a Reinforcement Learning (RL) based control design framework for handling complex tasks. The approach extends the concept of Reward Machines (RM) with Signal Temporal Logic (STL) formulas that can be used for event generation. The use of STL allows not only a more efficient representation of rewards for complex tasks but also guiding the training process to converge towards behaviors satisfying specified requirements. We also propose an implementation of the framework that leverages the STL online monitoring algorithms. We illustrate the framework with three case studies (minigrid, cart-pole and high-way environments) with non-trivial tasks.
Dynamic Intent Queries for Motion Transformer-based Trajectory Prediction
Apr 22, 2025



In autonomous driving, accurately predicting the movements of other traffic participants is crucial, as it significantly influences a vehicle's planning processes. Modern trajectory prediction models strive to interpret complex patterns and dependencies from agent and map data. The Motion Transformer (MTR) architecture and subsequent work define the most accurate methods in common benchmarks such as the Waymo Open Motion Benchmark. The MTR model employs pre-generated static intention points as initial goal points for trajectory prediction. However, the static nature of these points frequently leads to misalignment with map data in specific traffic scenarios, resulting in unfeasible or unrealistic goal points. Our research addresses this limitation by integrating scene-specific dynamic intention points into the MTR model. This adaptation of the MTR model was trained and evaluated on the Waymo Open Motion Dataset. Our findings demonstrate that incorporating dynamic intention points has a significant positive impact on trajectory prediction accuracy, especially for predictions over long time horizons. Furthermore, we analyze the impact on ground truth trajectories which are not compliant with the map data or are illegal maneuvers.
The OPNV Data Collection: A Dataset for Infrastructure-Supported Perception Research with Focus on Public Transportation
Jul 11, 2024This paper we present our vision and ongoing work for a novel dataset designed to advance research into the interoperability of intelligent vehicles and infrastructure, specifically aimed at enhancing cooperative perception and interaction in the realm of public transportation. Unlike conventional datasets centered on ego-vehicle data, this approach encompasses both a stationary sensor tower and a moving vehicle, each equipped with cameras, LiDARs, and GNSS, while the vehicle additionally includes an inertial navigation system. Our setup features comprehensive calibration and time synchronization, ensuring seamless and accurate sensor data fusion crucial for studying complex, dynamic scenes. Emphasizing public transportation, the dataset targets to include scenes like bus station maneuvers and driving on dedicated bus lanes, reflecting the specifics of small public buses. We introduce the open-source ".4mse" file format for the new dataset, accompanied by a research kit. This kit provides tools such as ego-motion compensation or LiDAR-to-camera projection enabling advanced research on intelligent vehicle-infrastructure integration. Our approach does not include annotations; however, we plan to implement automatically generated labels sourced from state-of-the-art public repositories. Several aspects are still up for discussion, and timely feedback from the community would be greatly appreciated. A sneak preview on one data frame will be available at a Google Colab Notebook. Moreover, we will use the related GitHub Repository to collect remarks and suggestions.
Towards Consistent and Explainable Motion Prediction using Heterogeneous Graph Attention
May 16, 2024In autonomous driving, accurately interpreting the movements of other road users and leveraging this knowledge to forecast future trajectories is crucial. This is typically achieved through the integration of map data and tracked trajectories of various agents. Numerous methodologies combine this information into a singular embedding for each agent, which is then utilized to predict future behavior. However, these approaches have a notable drawback in that they may lose exact location information during the encoding process. The encoding still includes general map information. However, the generation of valid and consistent trajectories is not guaranteed. This can cause the predicted trajectories to stray from the actual lanes. This paper introduces a new refinement module designed to project the predicted trajectories back onto the actual map, rectifying these discrepancies and leading towards more consistent predictions. This versatile module can be readily incorporated into a wide range of architectures. Additionally, we propose a novel scene encoder that handles all relations between agents and their environment in a single unified heterogeneous graph attention network. By analyzing the attention values on the different edges in this graph, we can gain unique insights into the neural network's inner workings leading towards a more explainable prediction.
Counter-example guided Imitation Learning of Feedback Controllers from Temporal Logic Specifications
Mar 25, 2024We present a novel method for imitation learning for control requirements expressed using Signal Temporal Logic (STL). More concretely we focus on the problem of training a neural network to imitate a complex controller. The learning process is guided by efficient data aggregation based on counter-examples and a coverage measure. Moreover, we introduce a method to evaluate the performance of the learned controller via parameterization and parameter estimation of the STL requirements. We demonstrate our approach with a flying robot case study.
Towards Efficient Active Learning of PDFA
Jun 17, 2022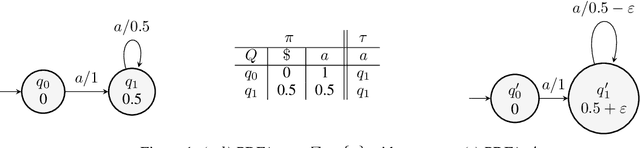
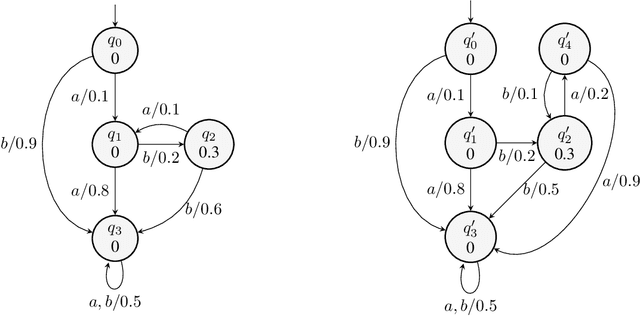
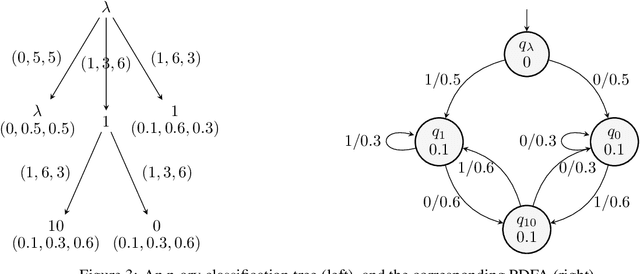
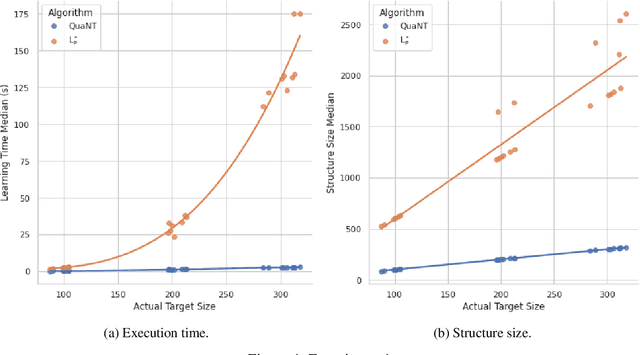
We propose a new active learning algorithm for PDFA based on three main aspects: a congruence over states which takes into account next-symbol probability distributions, a quantization that copes with differences in distributions, and an efficient tree-based data structure. Experiments showed significant performance gains with respect to reference implementations.
Identifying Scenarios in Field Data to Enable Validation of Highly Automated Driving Systems
Mar 09, 2022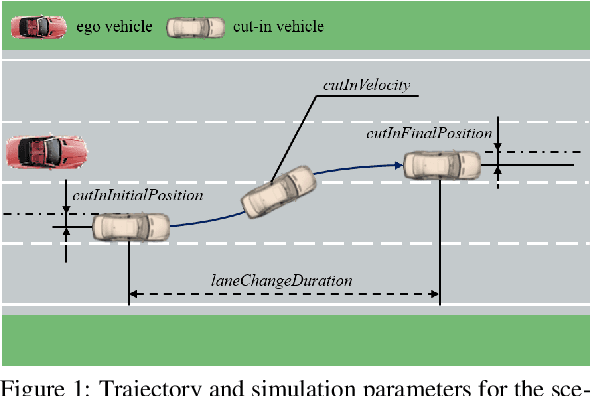
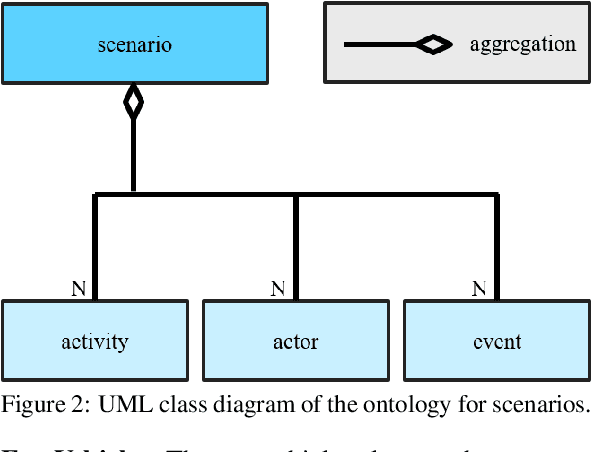
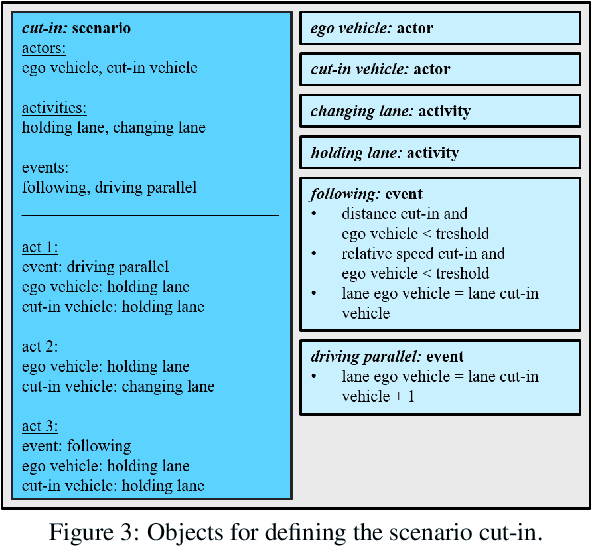
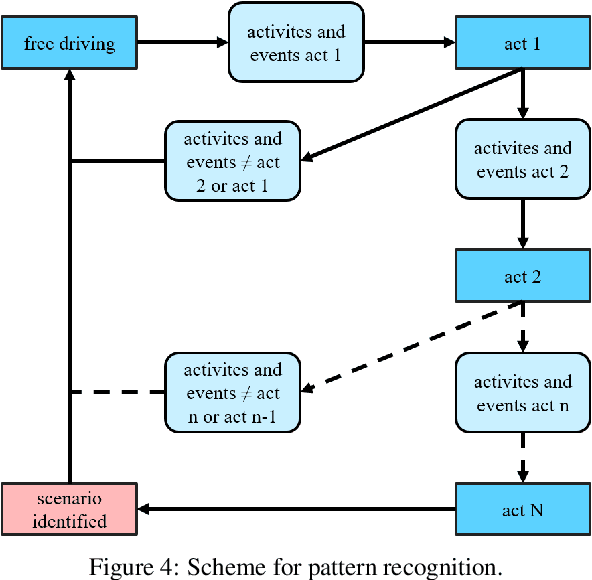
Scenario-based approaches for the validation of highly automated driving functions are based on the search for safety-critical characteristics of driving scenarios using software-in-the-loop simulations. This search requires information about the shape and probability of scenarios in real-world traffic. The scope of this work is to develop a method that identifies redefined logical driving scenarios in field data, so that this information can be derived subsequently. More precisely, a suitable approach is developed, implemented and validated using a traffic scenario as an example. The presented methodology is based on qualitative modelling of scenarios, which can be detected in abstracted field data. The abstraction is achieved by using universal elements of an ontology represented by a domain model. Already published approaches for such an abstraction are discussed and concretised with regard to the given application. By examining a first set of test data, it is shown that the developed method is a suitable approach for the identification of further driving scenarios.