 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounter-example guided Imitation Learning of Feedback Controllers from Temporal Logic Specifications
Mar 25, 2024We present a novel method for imitation learning for control requirements expressed using Signal Temporal Logic (STL). More concretely we focus on the problem of training a neural network to imitate a complex controller. The learning process is guided by efficient data aggregation based on counter-examples and a coverage measure. Moreover, we introduce a method to evaluate the performance of the learned controller via parameterization and parameter estimation of the STL requirements. We demonstrate our approach with a flying robot case study.
Interpretable Classification of Time-Series Data using Efficient Enumerative Techniques
Jul 24, 2019

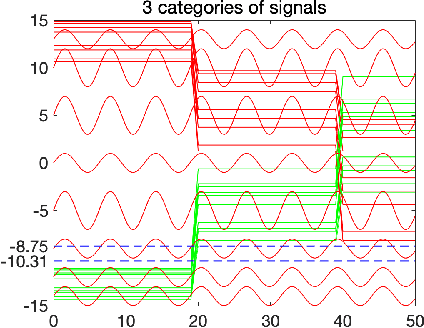
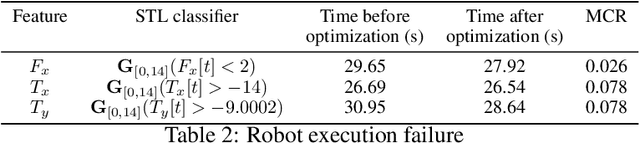
Cyber-physical system applications such as autonomous vehicles, wearable devices, and avionic systems generate a large volume of time-series data. Designers often look for tools to help classify and categorize the data. Traditional machine learning techniques for time-series data offer several solutions to solve these problems; however, the artifacts trained by these algorithms often lack interpretability. On the other hand, temporal logics, such as Signal Temporal Logic (STL) have been successfully used in the formal methods community as specifications of time-series behaviors. In this work, we propose a new technique to automatically learn temporal logic formulae that are able to cluster and classify real-valued time-series data. Previous work on learning STL formulas from data either assumes a formula-template to be given by the user, or assumes some special fragment of STL that enables exploring the formula structure in a systematic fashion. In our technique, we relax these assumptions, and provide a way to systematically explore the space of all STL formulas. As the space of all STL formulas is very large, and contains many semantically equivalent formulas, we suggest a technique to heuristically prune the space of formulas considered. Finally, we illustrate our technique on various case studies from the automotive, transportation and healthcare domain.
Compositional Falsification of Cyber-Physical Systems with Machine Learning Components
Nov 22, 2017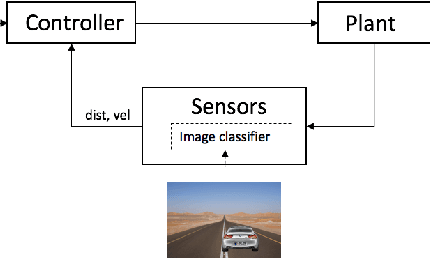
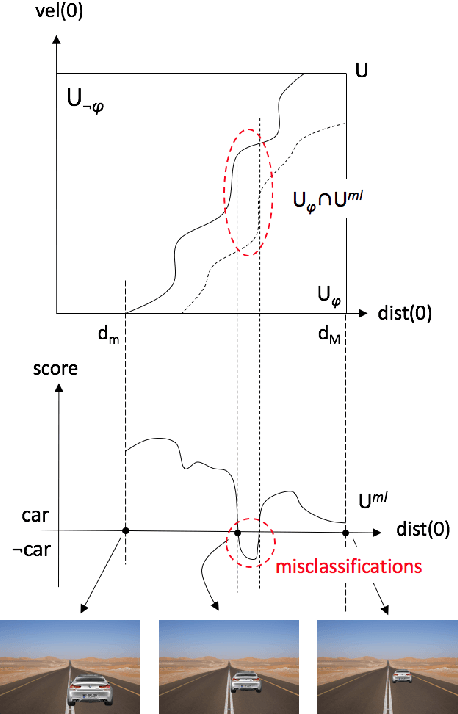
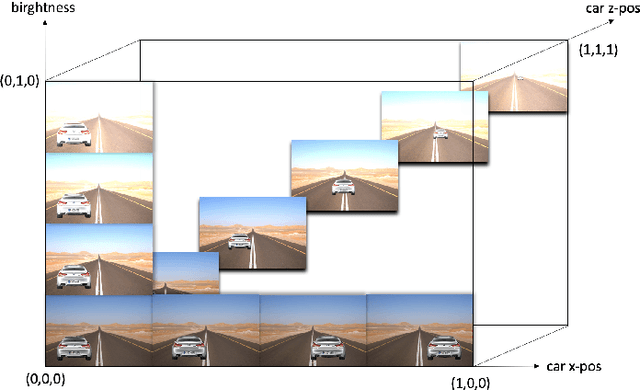
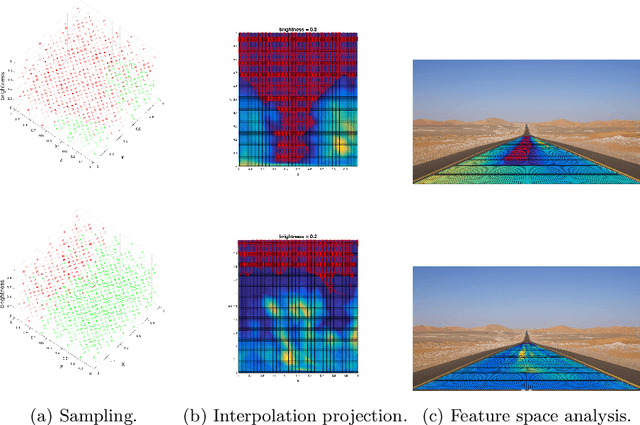
Cyber-physical systems (CPS), such as automotive systems, are starting to include sophisticated machine learning (ML) components. Their correctness, therefore, depends on properties of the inner ML modules. While learning algorithms aim to generalize from examples, they are only as good as the examples provided, and recent efforts have shown that they can produce inconsistent output under small adversarial perturbations. This raises the question: can the output from learning components can lead to a failure of the entire CPS? In this work, we address this question by formulating it as a problem of falsifying signal temporal logic (STL) specifications for CPS with ML components. We propose a compositional falsification framework where a temporal logic falsifier and a machine learning analyzer cooperate with the aim of finding falsifying executions of the considered model. The efficacy of the proposed technique is shown on an automatic emergency braking system model with a perception component based on deep neural networks.