 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Learning from Natural Language and Demonstrations using Signal Temporal Logic
Jul 01, 2022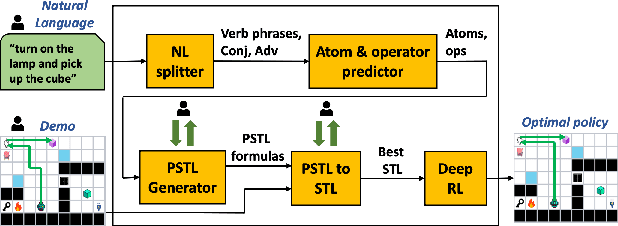



Natural language is an intuitive way for humans to communicate tasks to a robot. While natural language (NL) is ambiguous, real world tasks and their safety requirements need to be communicated unambiguously. Signal Temporal Logic (STL) is a formal logic that can serve as a versatile, expressive, and unambiguous formal language to describe robotic tasks. On one hand, existing work in using STL for the robotics domain typically requires end-users to express task specifications in STL, a challenge for non-expert users. On the other, translating from NL to STL specifications is currently restricted to specific fragments. In this work, we propose DIALOGUESTL, an interactive approach for learning correct and concise STL formulas from (often) ambiguous NL descriptions. We use a combination of semantic parsing, pre-trained transformer-based language models, and user-in-the-loop clarifications aided by a small number of user demonstrations to predict the best STL formula to encode NL task descriptions. An advantage of mapping NL to STL is that there has been considerable recent work on the use of reinforcement learning (RL) to identify control policies for robots. We show we can use Deep Q-Learning techniques to learn optimal policies from the learned STL specifications. We demonstrate that DIALOGUESTL is efficient, scalable, and robust, and has high accuracy in predicting the correct STL formula with a few number of demonstrations and a few interactions with an oracle user.
Mining Interpretable Spatio-temporal Logic Properties for Spatially Distributed Systems
Jun 16, 2021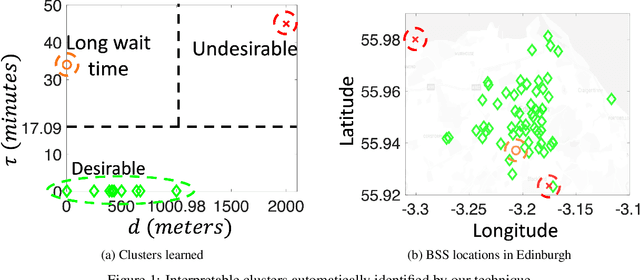
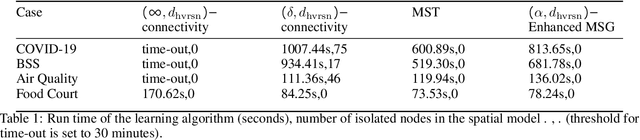
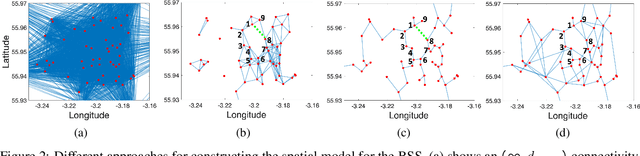

The Internet-of-Things, complex sensor networks, multi-agent cyber-physical systems are all examples of spatially distributed systems that continuously evolve in time. Such systems generate huge amounts of spatio-temporal data, and system designers are often interested in analyzing and discovering structure within the data. There has been considerable interest in learning causal and logical properties of temporal data using logics such as Signal Temporal Logic (STL); however, there is limited work on discovering such relations on spatio-temporal data. We propose the first set of algorithms for unsupervised learning for spatio-temporal data. Our method does automatic feature extraction from the spatio-temporal data by projecting it onto the parameter space of a parametric spatio-temporal reach and escape logic (PSTREL). We propose an agglomerative hierarchical clustering technique that guarantees that each cluster satisfies a distinct STREL formula. We show that our method generates STREL formulas of bounded description complexity using a novel decision-tree approach which generalizes previous unsupervised learning techniques for Signal Temporal Logic. We demonstrate the effectiveness of our approach on case studies from diverse domains such as urban transportation, epidemiology, green infrastructure, and air quality monitoring.
DiffRNN: Differential Verification of Recurrent Neural Networks
Jul 20, 2020
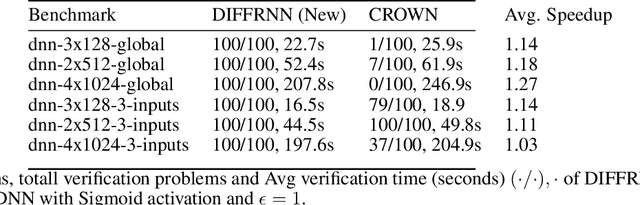
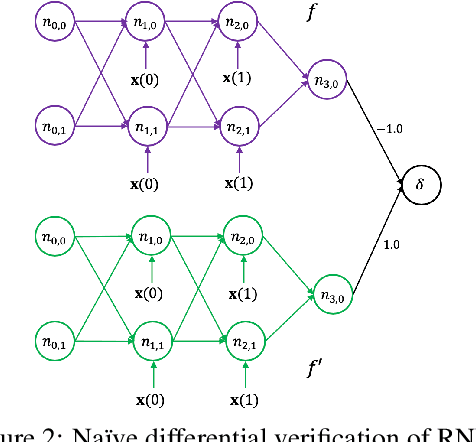
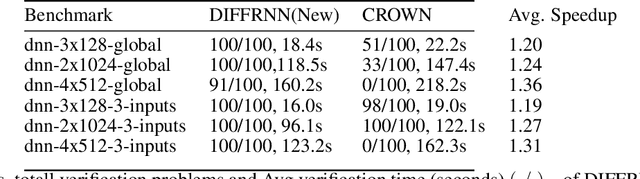
Recurrent neural networks (RNNs) such as Long Short Term Memory (LSTM) networks have become popular in a variety of applications such as image processing, data classification, speech recognition, and as controllers in autonomous systems. In practical settings, there is often a need to deploy such RNNs on resource-constrained platforms such as mobile phones or embedded devices. As the memory footprint and energy consumption of such components become a bottleneck, there is interest in compressing and optimizing such networks using a range of heuristic techniques. However, these techniques do not guarantee the safety of the optimized network, e.g., against adversarial inputs, or equivalence of the optimized and original networks. To address this problem, we propose DIFFRNN, the first differential verification method for RNNs to certify the equivalence of two structurally similar neural networks. Existing work on differential verification for ReLUbased feed-forward neural networks does not apply to RNNs where nonlinear activation functions such as Sigmoid and Tanh cannot be avoided. RNNs also pose unique challenges such as handling sequential inputs, complex feedback structures, and interactions between the gates and states. In DIFFRNN, we overcome these challenges by bounding nonlinear activation functions with linear constraints and then solving constrained optimization problems to compute tight bounding boxes on nonlinear surfaces in a high-dimensional space. The soundness of these bounding boxes is then proved using the dReal SMT solver. We demonstrate the practical efficacy of our technique on a variety of benchmarks and show that DIFFRNN outperforms state-of-the-art RNN verification tools such as POPQORN.
Mining Environment Assumptions for Cyber-Physical System Models
May 18, 2020


Many complex cyber-physical systems can be modeled as heterogeneous components interacting with each other in real-time. We assume that the correctness of each component can be specified as a requirement satisfied by the output signals produced by the component, and that such an output guarantee is expressed in a real-time temporal logic such as Signal Temporal Logic (STL). In this paper, we hypothesize that a large subset of input signals for which the corresponding output signals satisfy the output requirement can also be compactly described using an STL formula that we call the environment assumption. We propose an algorithm to mine such an environment assumption using a supervised learning technique. Essentially, our algorithm treats the environment assumption as a classifier that labels input signals as good if the corresponding output signal satisfies the output requirement, and as bad otherwise. Our learning method simultaneously learns the structure of the STL formula as well as the values of the numeric constants appearing in the formula. To achieve this, we combine a procedure to systematically enumerate candidate Parametric STL (PSTL) formulas, with a decision-tree based approach to learn parameter values. We demonstrate experimental results on real world data from several domains including transportation and health care.
Interpretable Classification of Time-Series Data using Efficient Enumerative Techniques
Jul 24, 2019

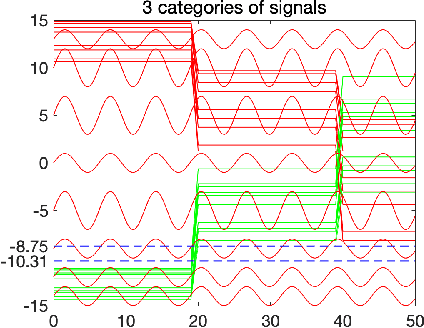
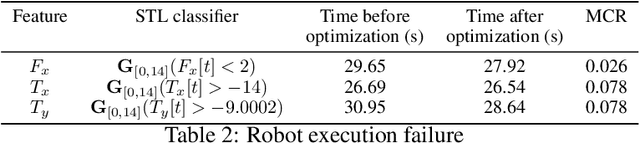
Cyber-physical system applications such as autonomous vehicles, wearable devices, and avionic systems generate a large volume of time-series data. Designers often look for tools to help classify and categorize the data. Traditional machine learning techniques for time-series data offer several solutions to solve these problems; however, the artifacts trained by these algorithms often lack interpretability. On the other hand, temporal logics, such as Signal Temporal Logic (STL) have been successfully used in the formal methods community as specifications of time-series behaviors. In this work, we propose a new technique to automatically learn temporal logic formulae that are able to cluster and classify real-valued time-series data. Previous work on learning STL formulas from data either assumes a formula-template to be given by the user, or assumes some special fragment of STL that enables exploring the formula structure in a systematic fashion. In our technique, we relax these assumptions, and provide a way to systematically explore the space of all STL formulas. As the space of all STL formulas is very large, and contains many semantically equivalent formulas, we suggest a technique to heuristically prune the space of formulas considered. Finally, we illustrate our technique on various case studies from the automotive, transportation and healthcare domain.