 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounter-example guided Imitation Learning of Feedback Controllers from Temporal Logic Specifications
Mar 25, 2024We present a novel method for imitation learning for control requirements expressed using Signal Temporal Logic (STL). More concretely we focus on the problem of training a neural network to imitate a complex controller. The learning process is guided by efficient data aggregation based on counter-examples and a coverage measure. Moreover, we introduce a method to evaluate the performance of the learned controller via parameterization and parameter estimation of the STL requirements. We demonstrate our approach with a flying robot case study.
A Digital Twin prototype for traffic sign recognition of a learning-enabled autonomous vehicle
Feb 14, 2024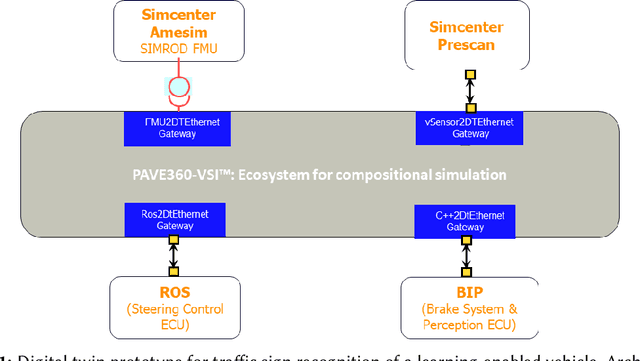
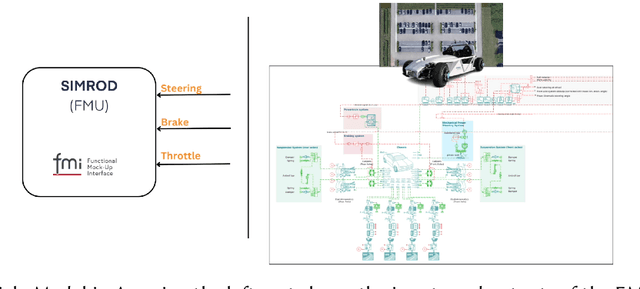
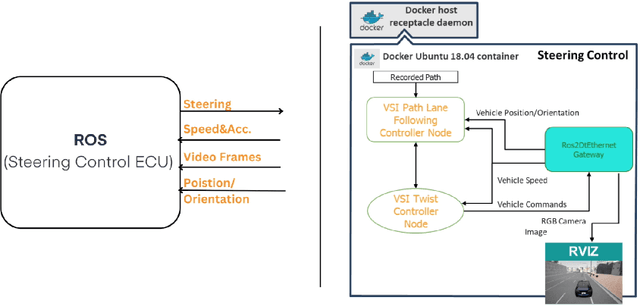
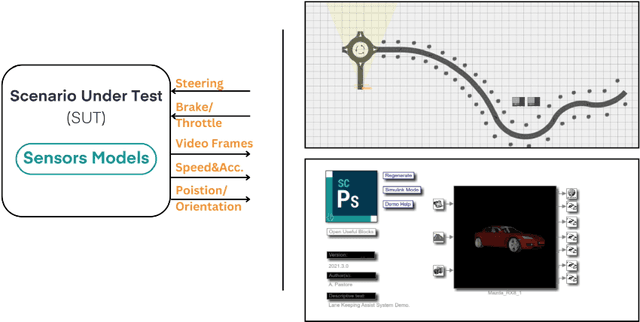
In this paper, we present a novel digital twin prototype for a learning-enabled self-driving vehicle. The primary objective of this digital twin is to perform traffic sign recognition and lane keeping. The digital twin architecture relies on co-simulation and uses the Functional Mock-up Interface and SystemC Transaction Level Modeling standards. The digital twin consists of four clients, i) a vehicle model that is designed in Amesim tool, ii) an environment model developed in Prescan, iii) a lane-keeping controller designed in Robot Operating System, and iv) a perception and speed control module developed in the formal modeling language of BIP (Behavior, Interaction, Priority). These clients interface with the digital twin platform, PAVE360-Veloce System Interconnect (PAVE360-VSI). PAVE360-VSI acts as the co-simulation orchestrator and is responsible for synchronization, interconnection, and data exchange through a server. The server establishes connections among the different clients and also ensures adherence to the Ethernet protocol. We conclude with illustrative digital twin simulations and recommendations for future work.
On Neural Network Equivalence Checking using SMT Solvers
Mar 22, 2022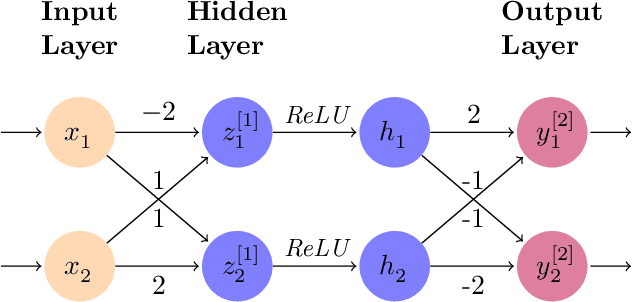
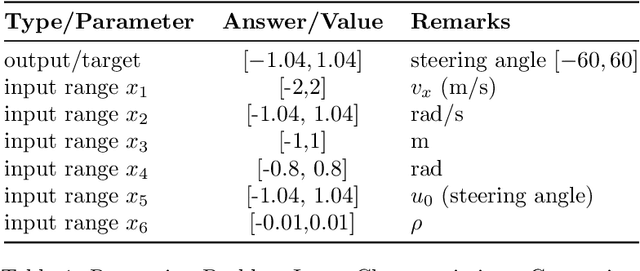
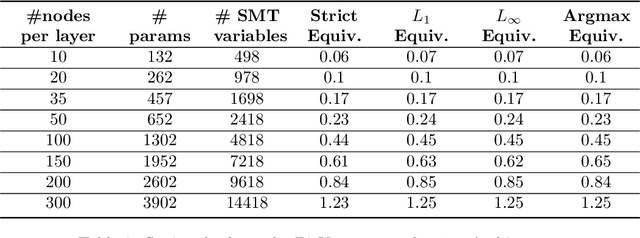
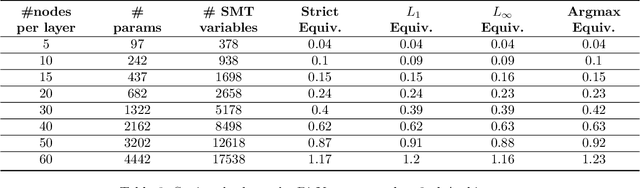
Two pretrained neural networks are deemed equivalent if they yield similar outputs for the same inputs. Equivalence checking of neural networks is of great importance, due to its utility in replacing learning-enabled components with equivalent ones, when there is need to fulfill additional requirements or to address security threats, as is the case for example when using knowledge distillation, adversarial training etc. SMT solvers can potentially provide solutions to the problem of neural network equivalence checking that will be sound and complete, but as it is expected any such solution is associated with significant limitations with respect to the size of neural networks to be checked. This work presents a first SMT-based encoding of the equivalence checking problem, explores its utility and limitations and proposes avenues for future research and improvements towards more scalable and practically applicable solutions. We present experimental results that shed light to the aforementioned issues, for diverse types of neural network models (classifiers and regression networks) and equivalence criteria, towards a general and application-independent equivalence checking approach.
Explaining Outcomes of Multi-Party Dialogues using Causal Learning
May 03, 2021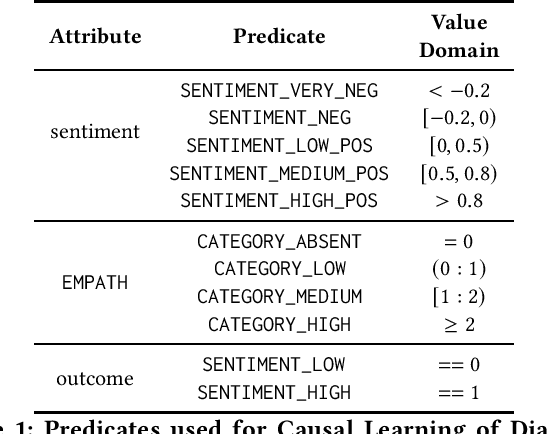

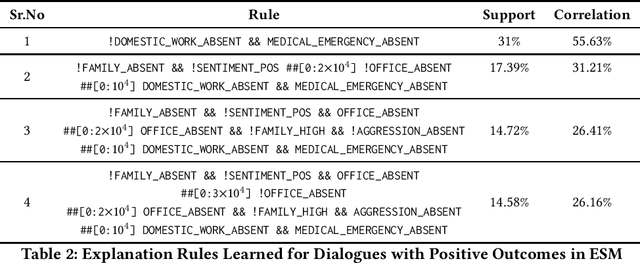
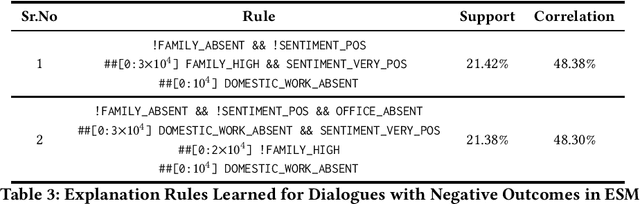
Multi-party dialogues are common in enterprise social media on technical as well as non-technical topics. The outcome of a conversation may be positive or negative. It is important to analyze why a dialogue ends with a particular sentiment from the point of view of conflict analysis as well as future collaboration design. We propose an explainable time series mining algorithm for such analysis. A dialogue is represented as an attributed time series of occurrences of keywords, EMPATH categories, and inferred sentiments at various points in its progress. A special decision tree, with decision metrics that take into account temporal relationships between dialogue events, is used for predicting the cause of the outcome sentiment. Interpretable rules mined from the classifier are used to explain the prediction. Experimental results are presented for the enterprise social media posts in a large company.