 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Digital Twin prototype for traffic sign recognition of a learning-enabled autonomous vehicle
Feb 14, 2024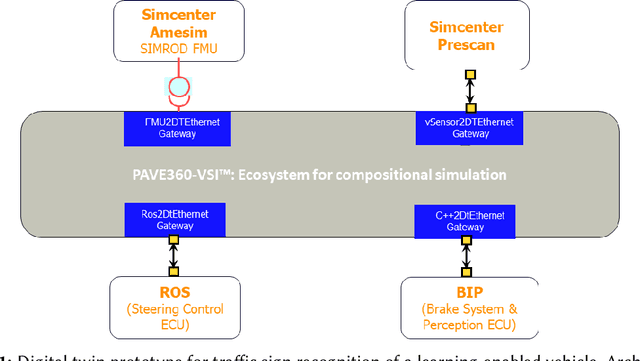
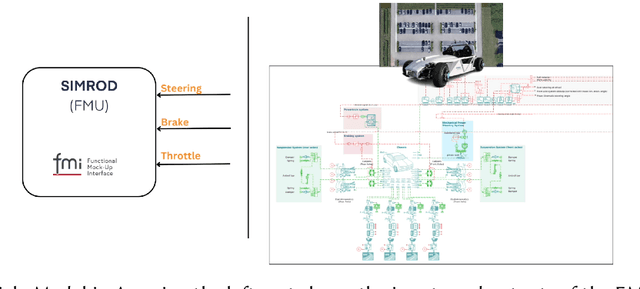
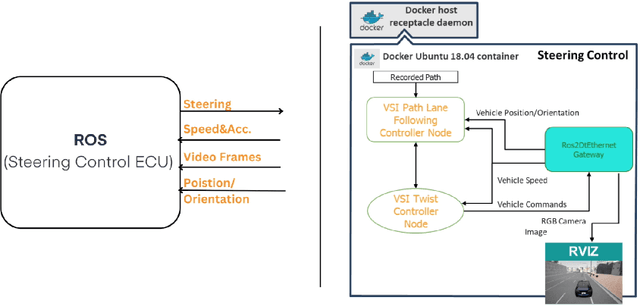
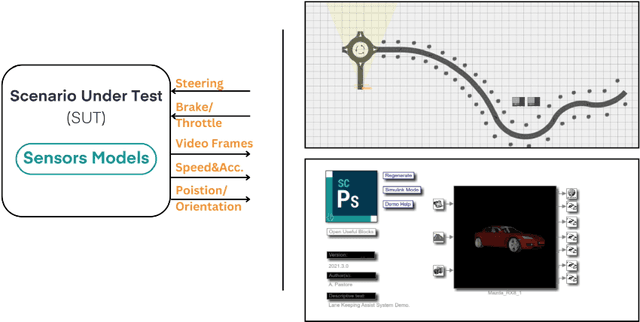
In this paper, we present a novel digital twin prototype for a learning-enabled self-driving vehicle. The primary objective of this digital twin is to perform traffic sign recognition and lane keeping. The digital twin architecture relies on co-simulation and uses the Functional Mock-up Interface and SystemC Transaction Level Modeling standards. The digital twin consists of four clients, i) a vehicle model that is designed in Amesim tool, ii) an environment model developed in Prescan, iii) a lane-keeping controller designed in Robot Operating System, and iv) a perception and speed control module developed in the formal modeling language of BIP (Behavior, Interaction, Priority). These clients interface with the digital twin platform, PAVE360-Veloce System Interconnect (PAVE360-VSI). PAVE360-VSI acts as the co-simulation orchestrator and is responsible for synchronization, interconnection, and data exchange through a server. The server establishes connections among the different clients and also ensures adherence to the Ethernet protocol. We conclude with illustrative digital twin simulations and recommendations for future work.
Synthesis of Parametric Programs using Genetic Programming and Model Checking
Feb 27, 2014

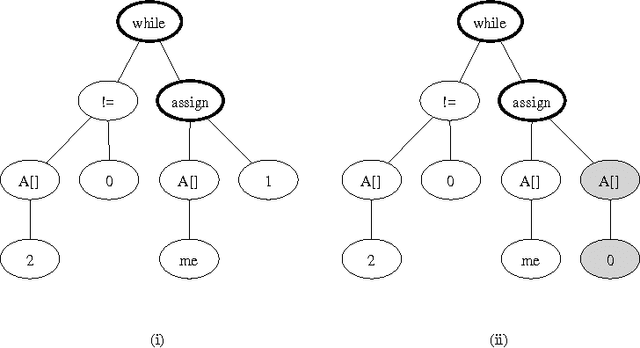

Formal methods apply algorithms based on mathematical principles to enhance the reliability of systems. It would only be natural to try to progress from verification, model checking or testing a system against its formal specification into constructing it automatically. Classical algorithmic synthesis theory provides interesting algorithms but also alarming high complexity and undecidability results. The use of genetic programming, in combination with model checking and testing, provides a powerful heuristic to synthesize programs. The method is not completely automatic, as it is fine tuned by a user that sets up the specification and parameters. It also does not guarantee to always succeed and converge towards a solution that satisfies all the required properties. However, we applied it successfully on quite nontrivial examples and managed to find solutions to hard programming challenges, as well as to improve and to correct code. We describe here several versions of our method for synthesizing sequential and concurrent systems.
* In Proceedings INFINITY 2013, arXiv:1402.6610