 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Hallucinations in YOLO-based Object Detection Models: A Revisit to Out-of-Distribution Detection
Mar 10, 2025Object detection systems must reliably perceive objects of interest without being overly confident to ensure safe decision-making in dynamic environments. Filtering techniques based on out-of-distribution (OoD) detection are commonly added as an extra safeguard to filter hallucinations caused by overconfidence in novel objects. Nevertheless, evaluating YOLO-family detectors and their filters under existing OoD benchmarks often leads to unsatisfactory performance. This paper studies the underlying reasons for performance bottlenecks and proposes a methodology to improve performance fundamentally. Our first contribution is a calibration of all existing evaluation results: Although images in existing OoD benchmark datasets are claimed not to have objects within in-distribution (ID) classes (i.e., categories defined in the training dataset), around 13% of objects detected by the object detector are actually ID objects. Dually, the ID dataset containing OoD objects can also negatively impact the decision boundary of filters. These ultimately lead to a significantly imprecise performance estimation. Our second contribution is to consider the task of hallucination reduction as a joint pipeline of detectors and filters. By developing a methodology to carefully synthesize an OoD dataset that semantically resembles the objects to be detected, and using the crafted OoD dataset in the fine-tuning of YOLO detectors to suppress the objectness score, we achieve a 88% reduction in overall hallucination error with a combined fine-tuned detection and filtering system on the self-driving benchmark BDD-100K. Our code and dataset are available at: https://gricad-gitlab.univ-grenoble-alpes.fr/dnn-safety/m-hood.
BAM: Box Abstraction Monitors for Real-time OoD Detection in Object Detection
Mar 27, 2024
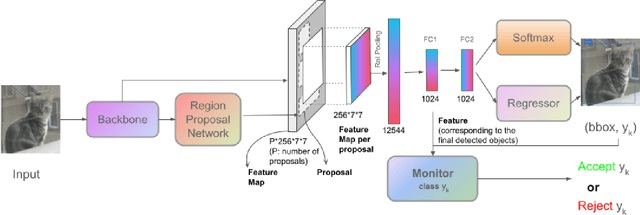
Out-of-distribution (OoD) detection techniques for deep neural networks (DNNs) become crucial thanks to their filtering of abnormal inputs, especially when DNNs are used in safety-critical applications and interact with an open and dynamic environment. Nevertheless, integrating OoD detection into state-of-the-art (SOTA) object detection DNNs poses significant challenges, partly due to the complexity introduced by the SOTA OoD construction methods, which require the modification of DNN architecture and the introduction of complex loss functions. This paper proposes a simple, yet surprisingly effective, method that requires neither retraining nor architectural change in object detection DNN, called Box Abstraction-based Monitors (BAM). The novelty of BAM stems from using a finite union of convex box abstractions to capture the learned features of objects for in-distribution (ID) data, and an important observation that features from OoD data are more likely to fall outside of these boxes. The union of convex regions within the feature space allows the formation of non-convex and interpretable decision boundaries, overcoming the limitations of VOS-like detectors without sacrificing real-time performance. Experiments integrating BAM into Faster R-CNN-based object detection DNNs demonstrate a considerably improved performance against SOTA OoD detection techniques.
A Digital Twin prototype for traffic sign recognition of a learning-enabled autonomous vehicle
Feb 14, 2024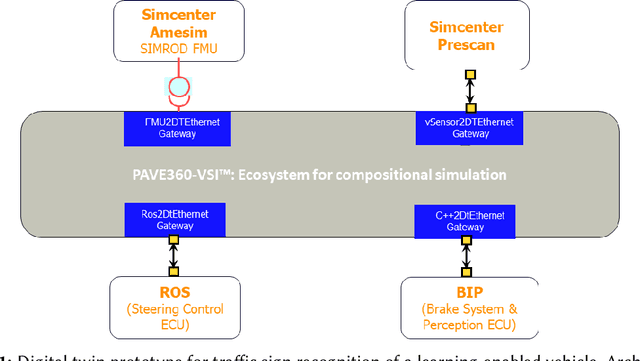
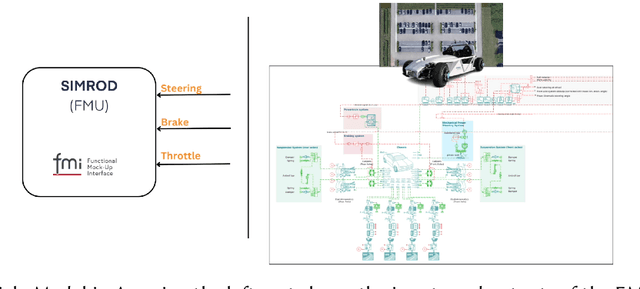
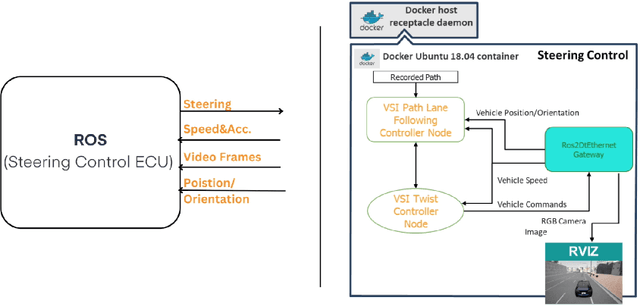
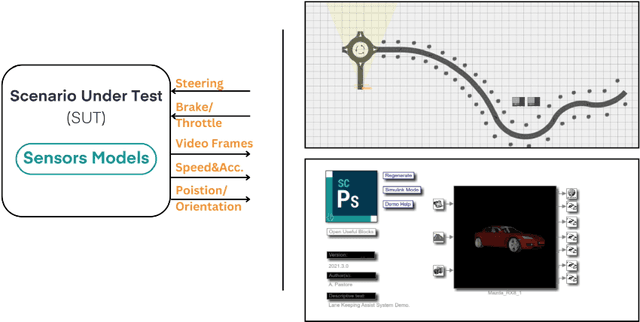
In this paper, we present a novel digital twin prototype for a learning-enabled self-driving vehicle. The primary objective of this digital twin is to perform traffic sign recognition and lane keeping. The digital twin architecture relies on co-simulation and uses the Functional Mock-up Interface and SystemC Transaction Level Modeling standards. The digital twin consists of four clients, i) a vehicle model that is designed in Amesim tool, ii) an environment model developed in Prescan, iii) a lane-keeping controller designed in Robot Operating System, and iv) a perception and speed control module developed in the formal modeling language of BIP (Behavior, Interaction, Priority). These clients interface with the digital twin platform, PAVE360-Veloce System Interconnect (PAVE360-VSI). PAVE360-VSI acts as the co-simulation orchestrator and is responsible for synchronization, interconnection, and data exchange through a server. The server establishes connections among the different clients and also ensures adherence to the Ethernet protocol. We conclude with illustrative digital twin simulations and recommendations for future work.