 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Digital Twin prototype for traffic sign recognition of a learning-enabled autonomous vehicle
Paper and Code
Feb 14, 2024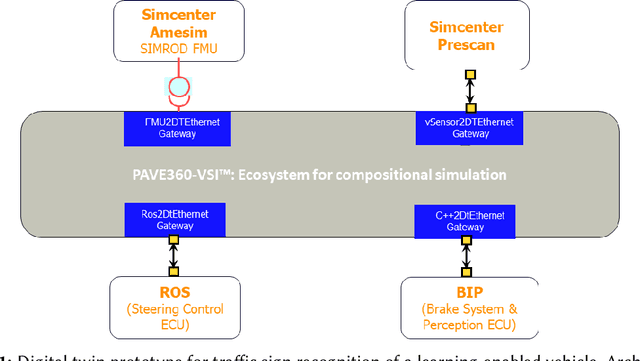
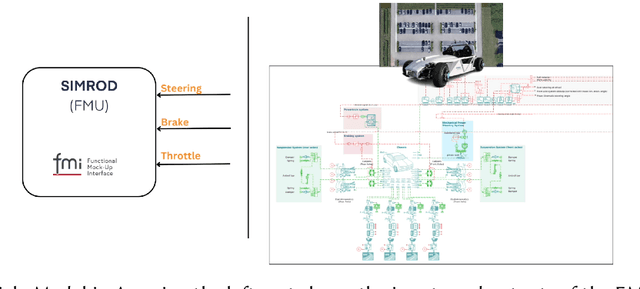
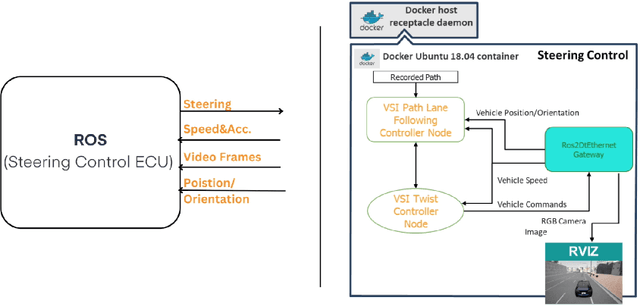
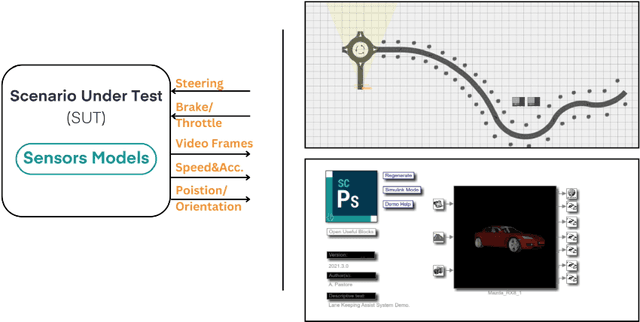
In this paper, we present a novel digital twin prototype for a learning-enabled self-driving vehicle. The primary objective of this digital twin is to perform traffic sign recognition and lane keeping. The digital twin architecture relies on co-simulation and uses the Functional Mock-up Interface and SystemC Transaction Level Modeling standards. The digital twin consists of four clients, i) a vehicle model that is designed in Amesim tool, ii) an environment model developed in Prescan, iii) a lane-keeping controller designed in Robot Operating System, and iv) a perception and speed control module developed in the formal modeling language of BIP (Behavior, Interaction, Priority). These clients interface with the digital twin platform, PAVE360-Veloce System Interconnect (PAVE360-VSI). PAVE360-VSI acts as the co-simulation orchestrator and is responsible for synchronization, interconnection, and data exchange through a server. The server establishes connections among the different clients and also ensures adherence to the Ethernet protocol. We conclude with illustrative digital twin simulations and recommendations for future work.