 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating the Joint Probability of Scenario Parameters with Gaussian Mixture Copula Models
Jun 11, 2025This paper presents the first application of Gaussian Mixture Copula Models to the statistical modeling of driving scenarios for the safety validation of automated driving systems. Knowledge of the joint probability distribution of scenario parameters is essential for scenario-based safety assessment, where risk quantification depends on the likelihood of concrete parameter combinations. Gaussian Mixture Copula Models bring together the multimodal expressivity of Gaussian Mixture Models and the flexibility of copulas, enabling separate modeling of marginal distributions and dependencies. We benchmark Gaussian Mixture Copula Models against previously proposed approaches - Gaussian Mixture Models and Gaussian Copula Models - using real-world driving data drawn from scenarios defined in United Nations Regulation No. 157. Our evaluation across 18 million scenario instances demonstrates that Gaussian Mixture Copula Models provide a better fit to the data in terms of both likelihood and Sinkhorn distance. These results suggest that Gaussian Mixture Copula Models are a compelling foundation for future scenario-based validation frameworks.
Statistical Modelling of Driving Scenarios in Road Traffic using Fleet Data of Production Vehicles
Apr 09, 2024



Ensuring the safety of road vehicles at an acceptable level requires the absence of any unreasonable risk arising from all potential hazards linked to the intended au-tomated driving function and its implementation. The assurance that there are no unreasonable risks stemming from hazardous behaviours associated to functional insufficiencies is denoted as safety of intended functionality (SOTIF), a concept outlined in the ISO 21448 standard. In this context, the acquisition of real driving data is considered essential for the verification and validation. For this purpose, we are currently developing a method with which data collect-ed representatively from production vehicles can be modelled into a knowledge-based system in the future. A system that represents the probabilities of occur-rence of concrete driving scenarios over the statistical population of road traffic and makes them usable. The method includes the qualitative and quantitative ab-straction of the drives recorded by the sensors in the vehicles, the possibility of subsequent wireless transmission of the abstracted data from the vehicles and the derivation of the distributions and correlations of scenario parameters. This paper provides a summary of the research project and outlines its central idea. To this end, among other things, the needs for statistical information and da-ta from road traffic are elaborated from ISO 21448, the current state of research is addressed, and methodical aspects are discussed.
Identifying Scenarios in Field Data to Enable Validation of Highly Automated Driving Systems
Mar 09, 2022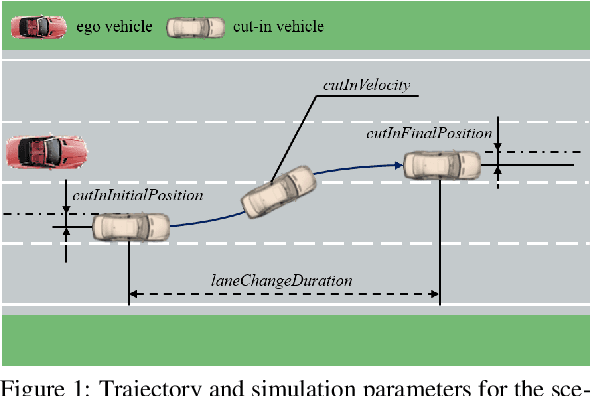
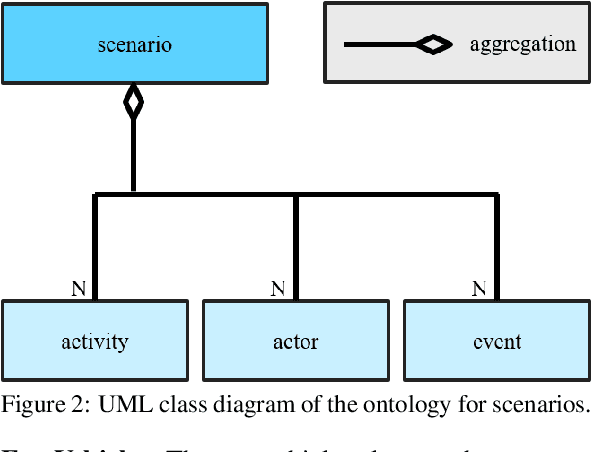
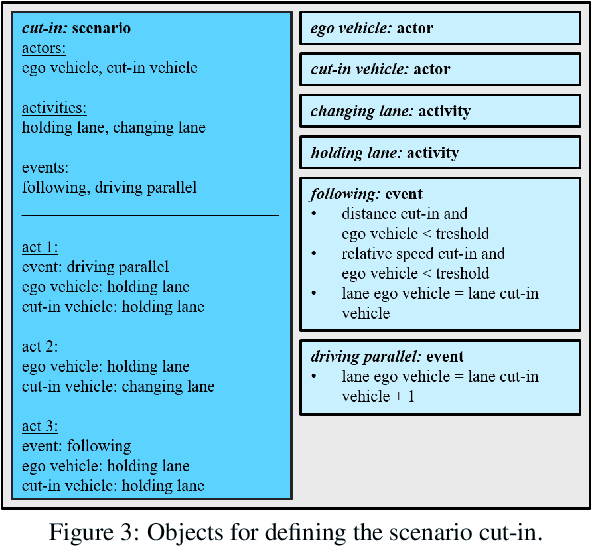
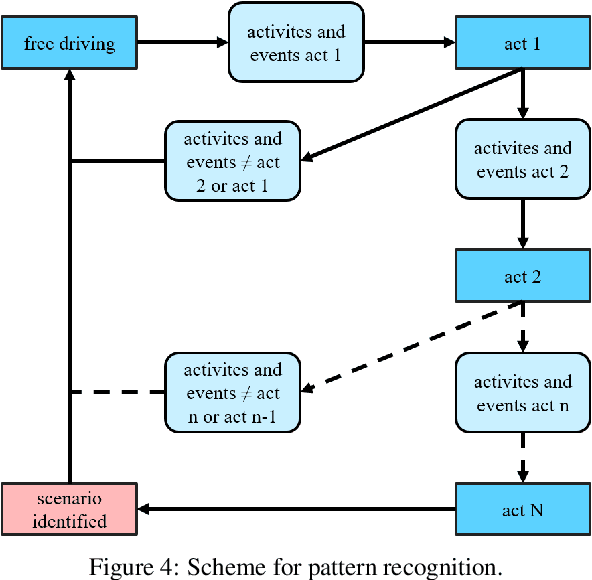
Scenario-based approaches for the validation of highly automated driving functions are based on the search for safety-critical characteristics of driving scenarios using software-in-the-loop simulations. This search requires information about the shape and probability of scenarios in real-world traffic. The scope of this work is to develop a method that identifies redefined logical driving scenarios in field data, so that this information can be derived subsequently. More precisely, a suitable approach is developed, implemented and validated using a traffic scenario as an example. The presented methodology is based on qualitative modelling of scenarios, which can be detected in abstracted field data. The abstraction is achieved by using universal elements of an ontology represented by a domain model. Already published approaches for such an abstraction are discussed and concretised with regard to the given application. By examining a first set of test data, it is shown that the developed method is a suitable approach for the identification of further driving scenarios.
The Atlas of Lane Changes: Investigating Location-dependent Lane Change Behaviors Using Measurement Data from a Customer Fleet
Jul 09, 2021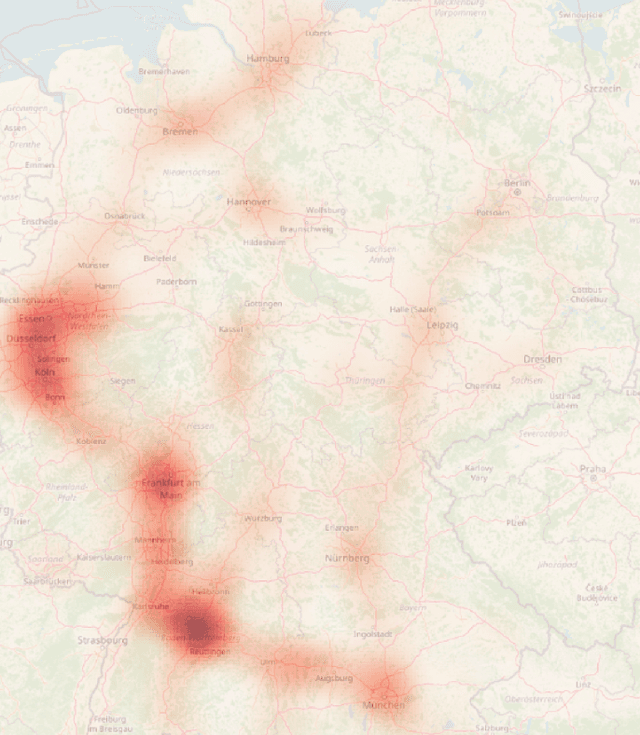
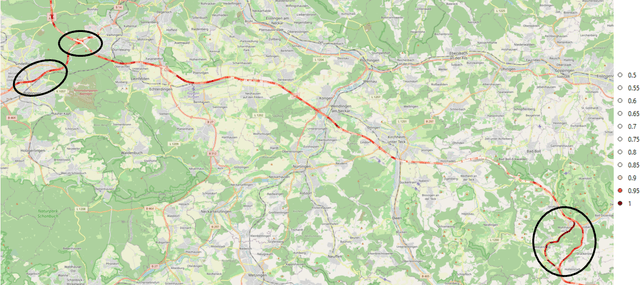

The prediction of surrounding traffic participants behavior is a crucial and challenging task for driver assistance and autonomous driving systems. Today's approaches mainly focus on modeling dynamic aspects of the traffic situation and try to predict traffic participants behavior based on this. In this article we take a first step towards extending this common practice by calculating location-specific a-priori lane change probabilities. The idea behind this is straight forward: The driving behavior of humans may vary in exactly the same traffic situation depending on the respective location. E.g. drivers may ask themselves: Should I pass the truck in front of me immediately or should I wait until reaching the less curvy part of my route lying only a few kilometers ahead? Although, such information is far away from allowing behavior prediction on its own, it is obvious that today's approaches will greatly benefit when incorporating such location-specific a-priori probabilities into their predictions. For example, our investigations show that highway interchanges tend to enhance driver's motivation to perform lane changes, whereas curves seem to have lane change-dampening effects. Nevertheless, the investigation of all considered local conditions shows that superposition of various effects can lead to unexpected probabilities at some locations. We thus suggest dynamically constructing and maintaining a lane change probability map based on customer fleet data in order to support onboard prediction systems with additional information. For deriving reliable lane change probabilities a broad customer fleet is the key to success.
Predicting the Time Until a Vehicle Changes the Lane Using LSTM-based Recurrent Neural Networks
Feb 03, 2021
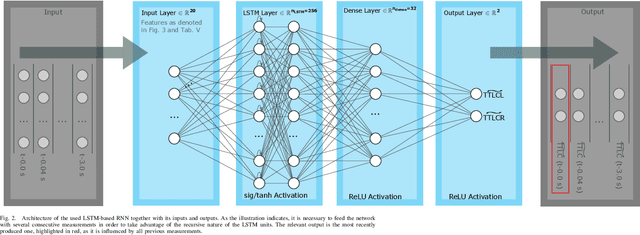
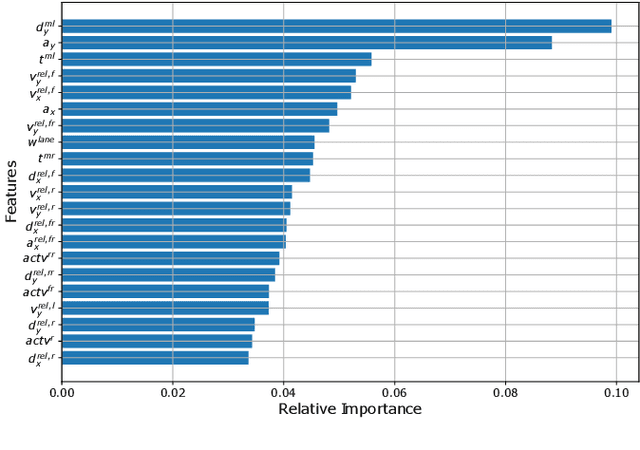
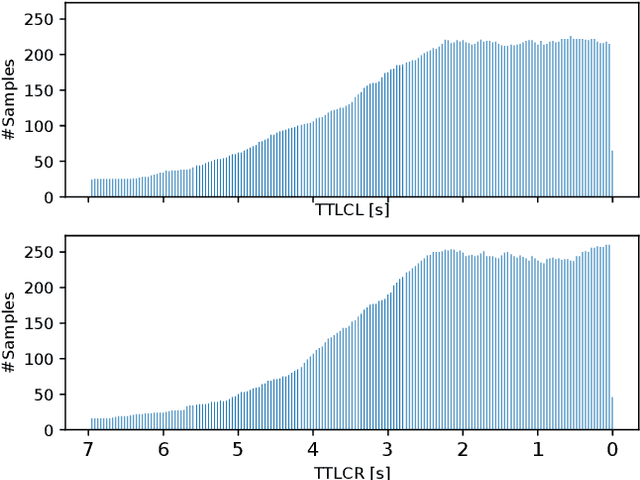
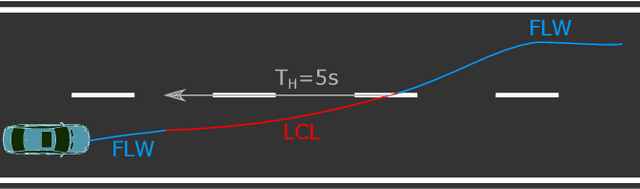
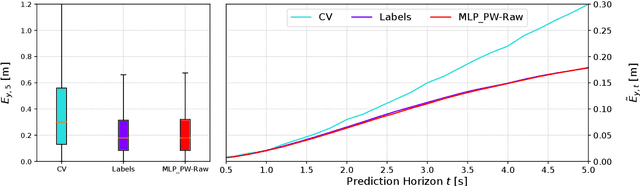
To plan safe and comfortable trajectories for automated vehicles on highways, accurate predictions of traffic situations are needed. So far, a lot of research effort has been spent on detecting lane change maneuvers rather than on estimating the point in time a lane change actually happens. In practice, however, this temporal information might be even more useful. This paper deals with the development of a system that accurately predicts the time to the next lane change of surrounding vehicles on highways using long short-term memory-based recurrent neural networks. An extensive evaluation based on a large real-world data set shows that our approach is able to make reliable predictions, even in the most challenging situations, with a root mean squared error around 0.7 seconds. Already 3.5 seconds prior to lane changes the predictions become highly accurate, showing a median error of less than 0.25 seconds. In summary, this article forms a fundamental step towards downstreamed highly accurate position predictions.
A Fleet Learning Architecture for Enhanced Behavior Predictions during Challenging External Conditions
Sep 24, 2020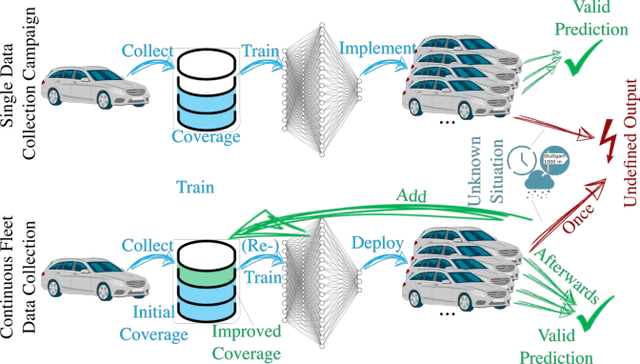
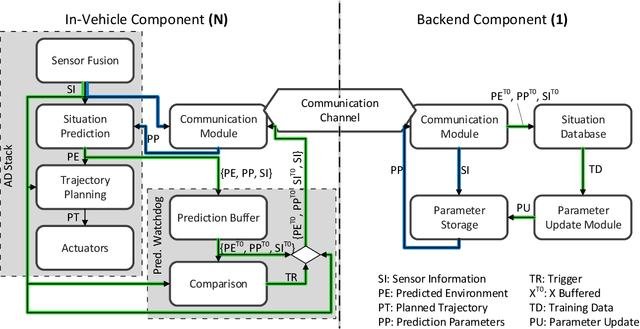

Already today, driver assistance systems help to make daily traffic more comfortable and safer. However, there are still situations that are quite rare but are hard to handle at the same time. In order to cope with these situations and to bridge the gap towards fully automated driving, it becomes necessary to not only collect enormous amounts of data but rather the right ones. This data can be used to develop and validate the systems through machine learning and simulation pipelines. Along this line this paper presents a fleet learning-based architecture that enables continuous improvements of systems predicting the movement of surrounding traffic participants. Moreover, the presented architecture is applied to a testing vehicle in order to prove the fundamental feasibility of the system. Finally, it is shown that the system collects meaningful data which are helpful to improve the underlying prediction systems.
Towards Incorporating Contextual Knowledge into the Prediction of Driving Behavior
Jul 04, 2020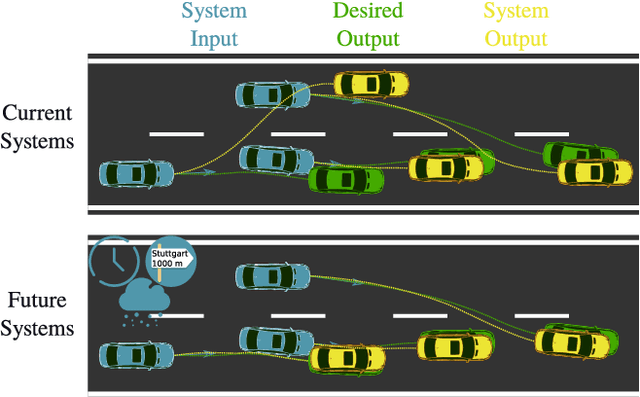
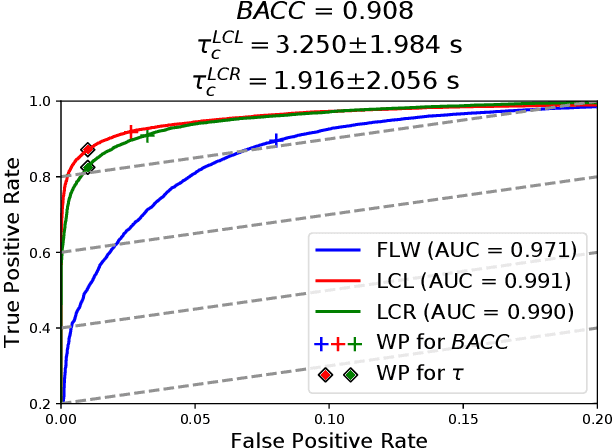
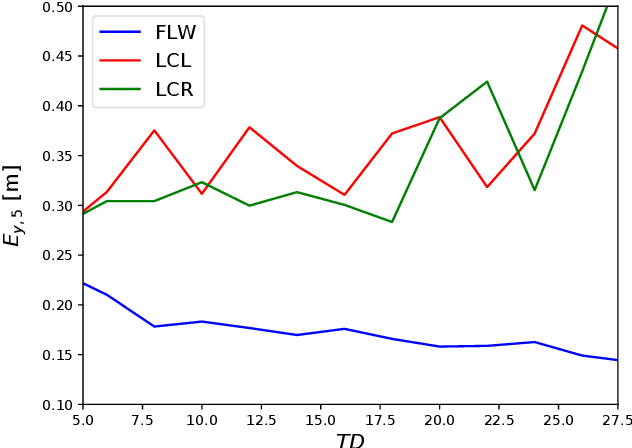
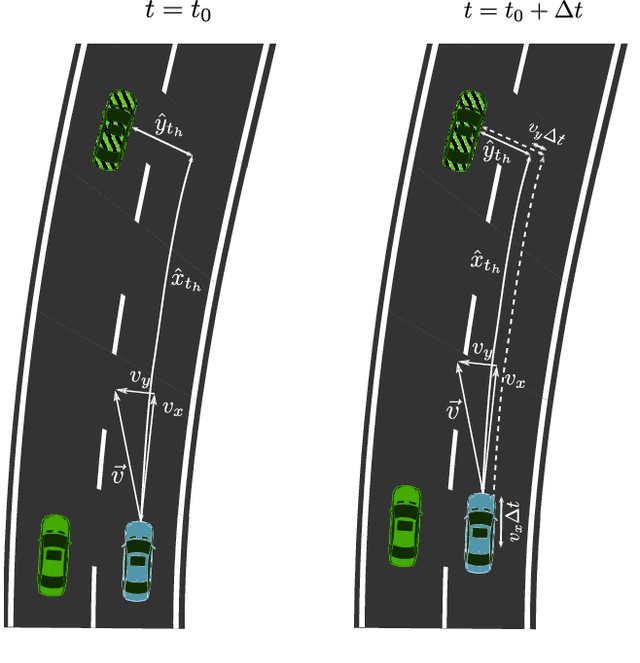
Predicting the behavior of surrounding traffic participants is crucial for advanced driver assistance systems and autonomous driving. Most researchers however do not consider contextual knowledge when predicting vehicle motion. Extending former studies, we investigate how predictions are affected by external conditions. To do so, we categorize different kinds of contextual information and provide a carefully chosen definition as well as examples for external conditions. More precisely, we investigate how a state-of-the-art approach for lateral motion prediction is influenced by one selected external condition, namely the traffic density. Our investigations demonstrate that this kind of information is highly relevant in order to improve the performance of prediction algorithms. Therefore, this study constitutes the first step towards the integration of such information into automated vehicles. Moreover, our motion prediction approach is evaluated based on the public highD data set showing a maneuver prediction performance with areas under the ROC curve above 97% and a median lateral prediction error of only 0.18m on a prediction horizon of 5s.
Teaching Vehicles to Anticipate: A Systematic Study on Probabilistic Behavior Prediction using Large Data Sets
Oct 17, 2019


Observations of traffic participants and their environment enable humans to drive road vehicles safely. However, when being driven, there is a notable difference between having a non-experienced vs. an experienced driver. One may get the feeling, that the latter one anticipates what may happen in the next few moments and considers these foresights in his driving behavior. To make the driving style of automated vehicles comparable to a human driver in the sense of comfort and perceived safety, the aforementioned anticipation skills need to become a built-in feature of self-driving vehicles. This article provides a systematic comparison of methods and strategies to generate this intention for self-driving cars using machine learning techniques. To implement and test these algorithms we use a large data set collected over more than 30000 km of highway driving and containing approximately 40000 real world driving situations. Moreover, we show that it is possible to certainly detect more than 47 % of all lane changes on German highways 3 or more seconds in advance with a false positive rate of less than 1 %. This enables us to predict the lateral position with a prediction horizon of 5 s with a median error of less than 0.21 m.