 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Atlas of Lane Changes: Investigating Location-dependent Lane Change Behaviors Using Measurement Data from a Customer Fleet
Paper and Code
Jul 09, 2021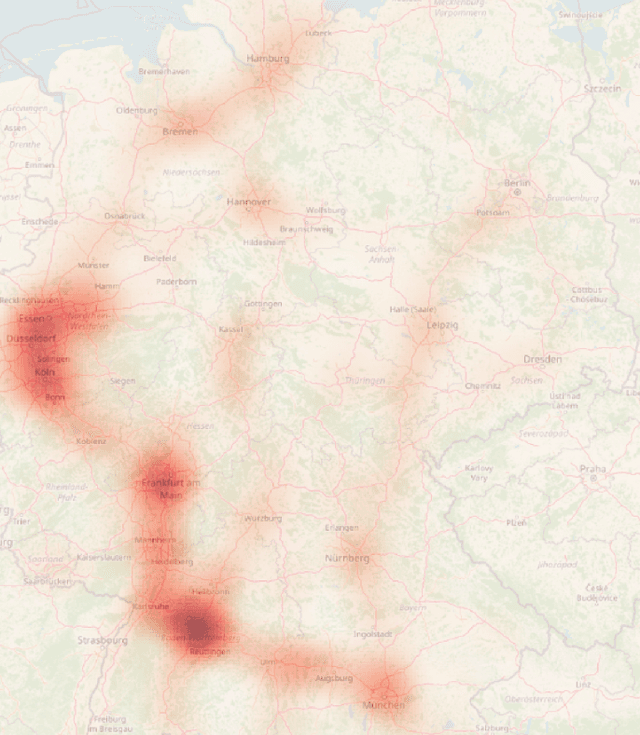
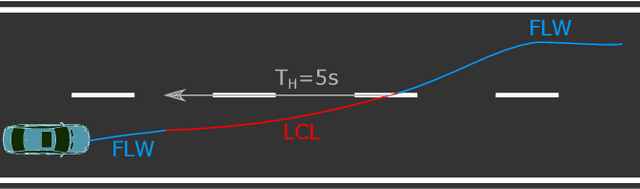
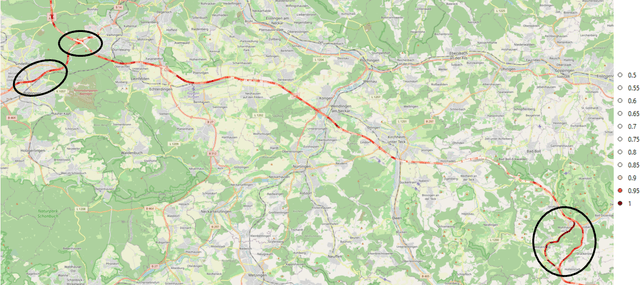

The prediction of surrounding traffic participants behavior is a crucial and challenging task for driver assistance and autonomous driving systems. Today's approaches mainly focus on modeling dynamic aspects of the traffic situation and try to predict traffic participants behavior based on this. In this article we take a first step towards extending this common practice by calculating location-specific a-priori lane change probabilities. The idea behind this is straight forward: The driving behavior of humans may vary in exactly the same traffic situation depending on the respective location. E.g. drivers may ask themselves: Should I pass the truck in front of me immediately or should I wait until reaching the less curvy part of my route lying only a few kilometers ahead? Although, such information is far away from allowing behavior prediction on its own, it is obvious that today's approaches will greatly benefit when incorporating such location-specific a-priori probabilities into their predictions. For example, our investigations show that highway interchanges tend to enhance driver's motivation to perform lane changes, whereas curves seem to have lane change-dampening effects. Nevertheless, the investigation of all considered local conditions shows that superposition of various effects can lead to unexpected probabilities at some locations. We thus suggest dynamically constructing and maintaining a lane change probability map based on customer fleet data in order to support onboard prediction systems with additional information. For deriving reliable lane change probabilities a broad customer fleet is the key to success.