 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting the Time Until a Vehicle Changes the Lane Using LSTM-based Recurrent Neural Networks
Feb 03, 2021
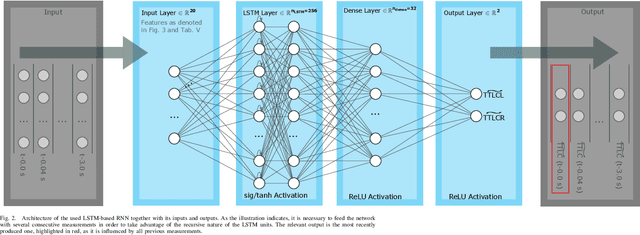
To plan safe and comfortable trajectories for automated vehicles on highways, accurate predictions of traffic situations are needed. So far, a lot of research effort has been spent on detecting lane change maneuvers rather than on estimating the point in time a lane change actually happens. In practice, however, this temporal information might be even more useful. This paper deals with the development of a system that accurately predicts the time to the next lane change of surrounding vehicles on highways using long short-term memory-based recurrent neural networks. An extensive evaluation based on a large real-world data set shows that our approach is able to make reliable predictions, even in the most challenging situations, with a root mean squared error around 0.7 seconds. Already 3.5 seconds prior to lane changes the predictions become highly accurate, showing a median error of less than 0.25 seconds. In summary, this article forms a fundamental step towards downstreamed highly accurate position predictions.
A Fleet Learning Architecture for Enhanced Behavior Predictions during Challenging External Conditions
Sep 24, 2020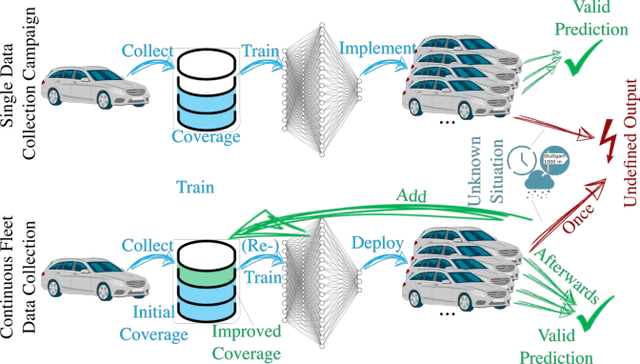
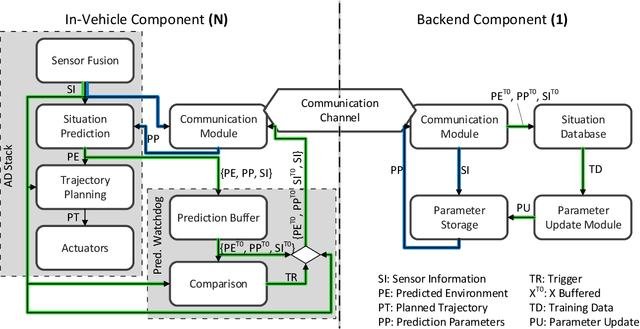

Already today, driver assistance systems help to make daily traffic more comfortable and safer. However, there are still situations that are quite rare but are hard to handle at the same time. In order to cope with these situations and to bridge the gap towards fully automated driving, it becomes necessary to not only collect enormous amounts of data but rather the right ones. This data can be used to develop and validate the systems through machine learning and simulation pipelines. Along this line this paper presents a fleet learning-based architecture that enables continuous improvements of systems predicting the movement of surrounding traffic participants. Moreover, the presented architecture is applied to a testing vehicle in order to prove the fundamental feasibility of the system. Finally, it is shown that the system collects meaningful data which are helpful to improve the underlying prediction systems.
Towards Incorporating Contextual Knowledge into the Prediction of Driving Behavior
Jul 04, 2020
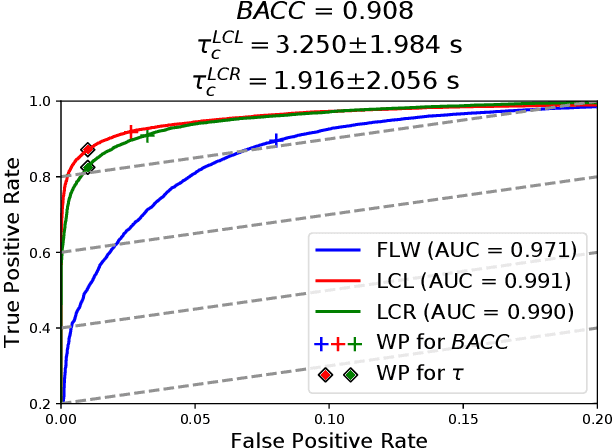
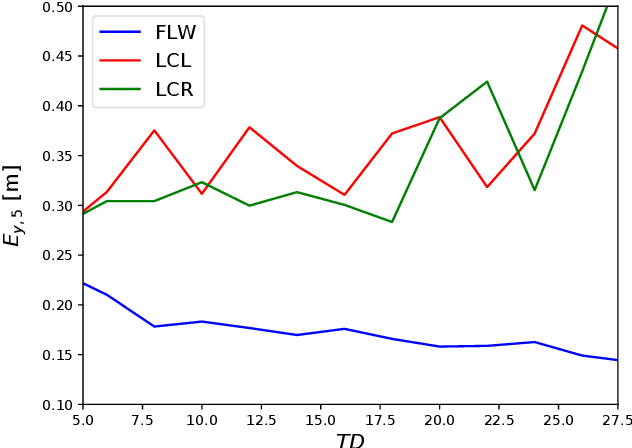
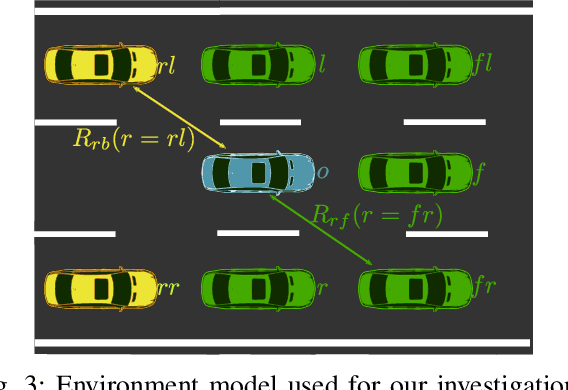
Predicting the behavior of surrounding traffic participants is crucial for advanced driver assistance systems and autonomous driving. Most researchers however do not consider contextual knowledge when predicting vehicle motion. Extending former studies, we investigate how predictions are affected by external conditions. To do so, we categorize different kinds of contextual information and provide a carefully chosen definition as well as examples for external conditions. More precisely, we investigate how a state-of-the-art approach for lateral motion prediction is influenced by one selected external condition, namely the traffic density. Our investigations demonstrate that this kind of information is highly relevant in order to improve the performance of prediction algorithms. Therefore, this study constitutes the first step towards the integration of such information into automated vehicles. Moreover, our motion prediction approach is evaluated based on the public highD data set showing a maneuver prediction performance with areas under the ROC curve above 97% and a median lateral prediction error of only 0.18m on a prediction horizon of 5s.
Teaching Vehicles to Anticipate: A Systematic Study on Probabilistic Behavior Prediction using Large Data Sets
Oct 17, 2019


Observations of traffic participants and their environment enable humans to drive road vehicles safely. However, when being driven, there is a notable difference between having a non-experienced vs. an experienced driver. One may get the feeling, that the latter one anticipates what may happen in the next few moments and considers these foresights in his driving behavior. To make the driving style of automated vehicles comparable to a human driver in the sense of comfort and perceived safety, the aforementioned anticipation skills need to become a built-in feature of self-driving vehicles. This article provides a systematic comparison of methods and strategies to generate this intention for self-driving cars using machine learning techniques. To implement and test these algorithms we use a large data set collected over more than 30000 km of highway driving and containing approximately 40000 real world driving situations. Moreover, we show that it is possible to certainly detect more than 47 % of all lane changes on German highways 3 or more seconds in advance with a false positive rate of less than 1 %. This enables us to predict the lateral position with a prediction horizon of 5 s with a median error of less than 0.21 m.